Синхронные электродвигатели. Работа и применение. Особенности
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.

Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.

Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Принцип действия синхронного двигателя
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора. 
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.

Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.

Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.

При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.

Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.

Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.

В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.

Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.
Устройство и принцип действия синхронных электродвигателей
Синхронный электродвигатель – электрическая установка, действующая от сети переменного и постоянного тока. Синхронная машина улучшает коэффициент мощности. Данные моторы используются довольно часто в электрической системе, потому что они подходят для любой сети напряжения и обладают высокими экономическими данными.
Область применения
- конвейеры,
- мощные вентиляторы,
- мельницы,
- эксгаустеры,
- компрессоры,
- дробилки,
- прокатные станки.
Преимущества и недостатки
Синхронный электродвигатель имеет сложнее структуру, чем асинхронный, но обладает некоторыми достоинствами.
Главным положительным качеством данных агрегатов является способность поддерживать оптимальный режим реактивной энергии. Из-за автоматического регулирования силы тока двигателя, он работает, не употребляя, не давая реактивную энергию, значение коэффициента мощности равняется 1. Если нужна реактивная энергия, она будет производиться синхронным мотором.
Данным двигателям не страшны перебои в сети, которой равен их максимальный момент. А значение критического момента равно квадрату напряжения.
Агрегат выдерживает большую перегрузку, которую можно еще увеличить автоматически повышением тока при необходимости непродолжительной нагрузки на вал. Он имеет постоянную скорость вращения независимо от нагрузки.
Трехфазный синхронный двигатель дороже обычного асинхронного из-за сложного механизма и особого устройства.
Еще недостатком оказывается надобность в постоянном источнике энергии, функции которого выполняет выпрямитель или специализированный возбудитель.
Устройство электродвигателя
Синхронный мотор имеет две основные части — статор и ротор. Неподвижная часть называется статором, а подвижный элемент ротором.
 Однофазный двигатель с короткозамкнутым ротором, расположенным в статоре или снаружи в двигателях обращенного вида. В основе ротора — постоянные магниты. Материал магнитов имеет высокую коэрцитивную силу. Полюсы ротора могут быть явно и неявно выраженными. Синхронный двигатель с короткозамкнутым ротором бывает с магнитами на поверхности или с уже встроенными.
Однофазный двигатель с короткозамкнутым ротором, расположенным в статоре или снаружи в двигателях обращенного вида. В основе ротора — постоянные магниты. Материал магнитов имеет высокую коэрцитивную силу. Полюсы ротора могут быть явно и неявно выраженными. Синхронный двигатель с короткозамкнутым ротором бывает с магнитами на поверхности или с уже встроенными.
Статор представлен корпусом и сердечником, состоящим из двухфазных и трехфазных обмоток. Обмотка бывает распределенная и сосредоточенная. У распределенной насчитываются пазы полюса и фазы Q= 2,3.
У сосредоточенной обмотки пазы полюса и фазы Q=1. Пазы размещены на одинаковом расстоянии на окружности неподвижной части двигателя. Катушки статора соединяются последовательно или параллельно. Такие обмотки не могут влиять на форму кривой ЭДС. Электродвижущая сила имеет трапецеидальную и синусоидальную форму. У явно выраженного полюса форма ротора и наводимая электродвижущая сила проводника является трапециевидной формы (а). При необходимости создания синусоидальной ЭДС, полюсные наконечники приобретают другую форму, где величина кривой распределения индукции близкая синусоидальной. Осуществление возможно благодаря наличию скосов на наконечнике полюса ротора.

Ротор синхронного двигателя переменного тока: а — явно выраженный полюс, 6 — неявно выраженный полюс.
Неявно выраженные полюса обладают равной индуктивностью продольных и поперечных осей, а явно выраженные полюса имеют одинаковую величину поперечной и продольной индуктивности (б).
Принцип действия

Принцип действия электрической машины переменного тока: 1 — статор, 2 — ротор.
У однофазного двигателя отсутствует пусковой момент. При подключении обмотки якоря к сети переменного тока, ротор неподвижен, в обмотку возбуждения поступает постоянный ток, за время одного изменения напряжения, два раза происходит смена направления электромагнитного момента. Значение среднего момента равняется нулю. Ротор разгоняется посредством внешнего момента до вращающейся частоты, которая приближается к синхронности.
Из-за высокого значения коэффициента мощности обеспечивается снижение потребления электричества, уменьшаются потери. В сравнении с асинхронным механизмом с такой же мощностью, синхронный двигатель имеет КПД выше. Так как крутящийся момент аналогичен напряжению сети. Даже снижение напряжения не влияет на нагрузочную способность. Что свидетельствует о надежности механизма.
Тип подключения делится на однофазный и трехфазный. Синхронные агрегаты чаще бывают трехфазными. При положении проводников трехфазного двигателя в определенной геометрической позиции появляется электромагнитное поле, которое вращается с одновременной скоростью. При имении магнита во вращающемся поле, они замыкают, крутятся параллельно. Двигатель можно назвать нерегулируемым, так как его скорость постоянная.
Пуск электродвигателя
Существует два способа пуска синхронной машины.
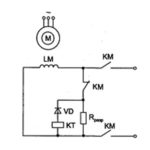
Схема пуска на основе глухо подключенного возбудителя, применима для статистического момента нагрузки менее 0,4, без падений напряжения.
![]()
Асинхронный пуск с помощью трансформатора
В обмотке возбуждения замыкается сопротивление разряда, избегая тем самым перебои возбуждения обмотки на впуске, потому как на небольшой скорости вращения ротора возникают перенапряжения. Если скорость приближается к синхронной, реагирует контактор, а обмотка возбуждения переключается из разрядного сопротивления на якорь возбудителя.
- Применение тиристорного возбудителя
Возбуждение, осуществляемое при помощи электромагнитного реле
Пуск с тиристорным возбудителем более надежный, обладает высоким КПД. Легче становится управление возбуждением, напряжение шин, остановка в аварийном режиме. Во многих моделях электродвигателей установлены тиристорные возбудители. Подача возбуждения работает автоматически функцией скорости и тока.
Синхронный компенсатор
Упрощенная конструкция для холостого хода называется компенсатором.
 Потребление электричества, помимо активной мощности, нуждается в реактивной мощности. Генератор вырабатывает реактивную мощность с минимальными затратами. Переход реактивной мощности генератора связан с потерями на линии передач. Поэтому применение компенсаторов является обоснованным экономически. При возбуждении синхронные двигатели не используют напряжение сети, а при перевозбуждении отдают реактивную мощность.
Потребление электричества, помимо активной мощности, нуждается в реактивной мощности. Генератор вырабатывает реактивную мощность с минимальными затратами. Переход реактивной мощности генератора связан с потерями на линии передач. Поэтому применение компенсаторов является обоснованным экономически. При возбуждении синхронные двигатели не используют напряжение сети, а при перевозбуждении отдают реактивную мощность.
Синхронный электродвигатель применяется в сети переменного и постоянного тока, обеспечивая высокую надежность работы. Этот двигатель улучшит коэффициент мощности предприятия.
Принцип действия и устройство синхронного двигателя: преимущества, конструктивные особенности
Синхронный двигатель. Устройство синхронной машины. Работа синхронного двигателя. Сравнение синхронных и асинхронных двигателей
Синхронные машины используются в качестве источников электрической энергии (генераторов), электродвигателей и синхронных компенсаторов. Именно с помощью синхронных трехфазных генераторов вырабатывается электрическая энергия на электростанциях.
Синхронные двигатели в силу особых свойств, не получили широкого распространения. Синхронные трехфазные двигатели применяются обычно лишь в установках средней и большой мощности при редких пусках, в случаях, когда не требуется электрического регулирования скорости.
Наряду с этим, в системах управления, измерения, записи и воспроизведения звука, особенно для привода лентопротяжных и регистрирующих устройств, широко применяются синхронные микродвигатели.
Трехфазные синхронные генераторы, двигатели и синхронные компенсаторы в принципе имеют одинаковое устройство.
Устройство синхронной машины

Рис. 1 Устройство синхронной машины с неявно выраженными полюсами (а) и ротора машины с явно выраженными полюсами (б)
Неподвижная часть машины, называемая статором или якорем (рис. 1, а), состоит из стального или чугунного корпуса 1, в котором закреплен цилиндрический сердечник 2 якоря.
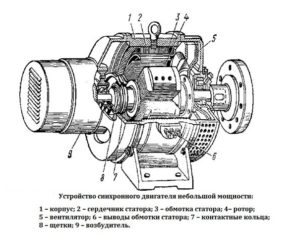
Для уменьшения потерь на перемагничивание и вихревые токи сердечник набирают из листов электротехнической стали. В пазах сердечника якоря уложена трехфазных обмотка 3. В подшипниковых щитах, прикрепленных с торцевых сторон к корпусу, либо в стояках, закрепленных на фундаменте, расположены подшипники, несущие вал 4 вращающейся части машины – ротора или индуктора. На валу размещен цилиндрический сердечник 7 ротора, выполняемый из сплошной стали. В пазах сердечника ротора уложена обмотка возбуждения 8, питаемая постоянным током. Для присоединения обмотки возбуждения к внешней электрической цепи на валу укрепляют два изолированных друг от друга и от вала контактных кольца 6, к которым пружинами прижимаются неподвижные щетки 5. Обмотка 8 служит для возбуждения основного магнитного поля машины. Обмотка возбуждения с сердечником ротора представляют собой по существу электромагнит. Питание обмотки возбуждения осуществляется либо от генератора постоянного тока, вал которого механически связан с валом синхронной машины, либо через вентили от источника переменного тока. Мощность, необходимая для питания обмотки возбуждения, невелика и составляет 1 ÷ 3% от мощности машины.
На рис. 1, а показана двухполюсная синхронная машина с неявно выраженными полюсами ротора. Такие машины изготовляют на скорости 3000 об/мин. Синхронные машины, предназначенные для работы с меньшими скоростями (1500, 1000, 750 об/мин и т. д.), имеют явно выраженные полюса, число которых тем больше, чем меньше скорость. На рис. 1, б показано устройство ротора четырехполюсной машины с явно выраженными полюсами. Явно выраженные полюса 1 изготовляют из отдельных стальных листов или реже массивными и закрепляют на ободе 2 ротора с помощью винтов. Отдельные части (катушки) обмотки возбуждения 3, расположенные на явно выраженных полюсах, соединены между собой так, что северные и южные полюса чередуются.
Трехфазная обмотка якоря синхронных машин выполняется таким образом, что возбуждаемое ею вращающееся магнитное поле имеет всегда такое же число полюсов, как ротор.
Работа синхронного двигателя
При работе синхронной машины в качестве двигателя обмотка якоря подключается к трехфазному источнику переменного тока, в результате чего возникает вращающийся магнитный поток якоря Фя.
После разгона ротора двигателя до скорости n ≈ n0 его обмотка возбуждения подключается к источнику постоянного тока, и возникает магнитный поток Ф0. Благодаря взаимодействию вращающегося магнитного потока Фя и проводников обмотки ротора, питаемой постоянным током (или потоков Фя и Ф0) возникает вращающий момент, действующий на ротор, и он втягивается в синхронизм, т. е. начинает вращаться со скоростью n, равной скорости n0 вращающегося магнитного поля якоря.
При изменении нагрузки двигателя скорость вращения ротора остается постоянной (n = n0), однако положение ротора относительно вращающегося магнитного потока Фя изменяется. Так, при моменте статического сопротивления Мс = 0 ротор занимает положение относительно потока Фя, показанное на рис. 2, а.

Рис. 2 Возникновение крутящего момента синхронного двигателя
Момент двигателя в этом случае М = Мс = 0. Увеличение момента сопротивления Мс приводит к такому смещению ротора относительно потока Фя, при котором возникает вращающий момент М двигателя, уравновешивающий момент Мс (рис. 2, б)
Существенной особенностью синхронного двигателя является то, что вращающий момент возникает у него в том случае, когда скорость вращения ротора n равна скорости n0 вращающегося магнитного поля якоря Фя. Возникновение вращающего момента при равенстве скоростей n и n0 у синхронного двигателя объясняется тем, что ток в его обмотке возбуждения появляется вследствие питания обмотки возбуждения от источника постоянного тока.
Скорость вращающегося магнитного поля якоря, а значит, ротора синхронного двигателя определяется по формуле
Для получения различных скоростей синхронные двигатели изготовляют с различными числами пар полюсов p.
При частоте f = 50 Гц скорости вращения синхронных двигателей будут равны 3000, 1500, 1000, 755 об/мин и т. д.
Сравнение синхронных и асинхронных двигателей
Обмотки статора обоих двигателей получают питание от сети трехфазного переменного тока. Для питания обмотки возбуждения синхронного двигателя требуется, кроме того, источник электрической энергии постоянного тока, правда, относительно небольшой мощности.
Асинхронный пуск синхронных двигателей несколько сложнее пуска асинхронных двигателей с короткозамкнутым ротором. В отношении пусковых свойств асинхронные двигатели с фазным ротором имеют весьма существенные преимущества перед синхронными двигателями.
Частота вращения синхронных двигателей остается постоянной при изменении нагрузки, тогда как у асинхронных двигателей даже при их работе на естественной характеристике она несколько изменяется.
Асинхронные двигатели дают возможность регулировать частоту вращения различными способами (изменением числа пар полюсов, измерением частоты напряжение источника питания). Синхронные двигатели относятся к двигателям с нерегулируемой частотой вращения.
Воздействуя на ток возбуждения синхронного двигателя, можно в широких пределах изменять его коэффициент мощности. Можно, в частности, заставить синхронный двигатель работать с cosφ = 1, а также с опережающим током. Последнее может быть использовано для улучшения коэффициента мощности других потребителей, питающихся от той же сети. В отличие от этого асинхронный двигатель представляет собой активно-индуктивную нагрузку и имеет всегда cosφ Другие новости по теме:
Электродвигатели
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является – электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор – неподвижная часть, ротор – вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя




- Подробное описание принципа работы электродвигателей разных типов:
- Принцип работы однофазного асинхронного электродвигателя
- Принцип работы трехфазного асинхронного электродвигателя
- Принцип работы синхронного электродвигателя
Классификация электродвигателей
| Вращающийся электродвигатель | ||||
|---|---|---|---|---|
| Само коммутируемый | Внешне коммутируемый | |||
| С механической коммутацией (коллекторный) | С электронной коммутацией 1 (вентильный 2, 3 ) | Асинхронный электродвигатель | Синхронный электродвигатель | |
| Переменного тока | Постоянного тока | Переменного тока 4 | Переменного тока | |
|
|
|
|
|
| Простая электроника | Выпрямители, транзисторы | Более сложная электроника | Сложная электроника (ЧП) | |
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, – датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока – электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ – коллекторный двигатель постоянного тока
- БДПТ – бесколлекторный двигатель постоянного тока
- ЭП – электрический преобразователь
- ДПР – датчик положения ротора
- ВРД – вентильный реактивный двигатель
- АДКР – асинхронный двигатель с короткозамкнутым ротором
- АДФР – асинхронный двигатель с фазным ротором
- СДОВ – синхронный двигатель с обмоткой возбуждения
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина – вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель

Коллекторный электродвигатель постоянного тока
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина – вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].

Асинхронный электродвигатель

Cинхронный электродвигатель
Специальные электродвигатели

Серводвигатель
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
 ,
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
 ,
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин -1 [4]
Начальный пусковой момент – момент электродвигателя при пуске.
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
 ,
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].
 ,
,
Для вращательного движения
 ,
,
- где
 – угол, рад,
– угол, рад,
 – угол, рад,
– угол, рад, ,
,
- где – углавая скорость, рад/с,
 – углавая скорость, рад/с,
– углавая скорость, рад/с,Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
 ,
,
- где – коэффициент полезного действия электродвигателя,
- P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (механическая), Вт
 – коэффициент полезного действия электродвигателя,
– коэффициент полезного действия электродвигателя,- При этом потери в электродвигатели обусловлены:
- электрическими потерями – в виде тепла в результате нагрева проводников с током;
- магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Частота вращения

- где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
 ,
,
- где J – момент инерции, кг∙м 2 ,
- m – масса, кг
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением
 ,
,
- где – угловое ускорение, с -2 [2]
 – угловое ускорение, с -2 [2]
– угловое ускорение, с -2 [2] ,
,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где – постоянная времени, с
 – постоянная времени, с
– постоянная времени, сМеханическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.


| Параметр |  АДКР |  СДПМП |  СДПМВ |  СРД-ПМ |  СДОВ |
|---|---|---|---|---|---|
| Постоянство мощности во всем диапазоне скоростей | |||||
| Момент к току статора | |||||
| Эффективность (КПД) во всем рабочем диапазоне |
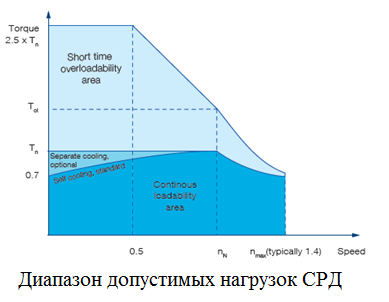
В соответствии с выше приведенными показателями гибридный синхронный электродвигатель, а именно синхронный реактивный электродвигатель со встроенными постоянными магнитами, является наиболее подходящим для применения в качестве тягового электродвигателя в автомобилестроении (выбор проводился для концепта автомобилей BMW i3 & BMW i8). Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне [7]. Области применения электродвигателейЭлектродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии [6]. Синхронные реактивные двигатели (СРД)Введение А теперь представьте себе электрический двигатель с максимально простой конструкцией ротора. Это сделать довольно-таки сложно из-за сложившихся стереотипов о функционировании электрической машины, но именно так можно вкратце описать набирающие популярность Синхронные Реактивные Двигатели (с англ. Synchronous Reluctance Machine, СРД). В последнее время на эти электрические машины все больше обращают внимание производители двигателей, а также инжиниринговые компании по всему миру, и не случайно. Давайте разберемся, что же из себя представляют СРД. Синхронный Реактивный Электродвигатель – синхронная машина, вращающий момент которой обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов – такое определение дает ГОСТ 27471-87. Принцип работы синхронного реактивного двигателяПеременный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается когда ротор пытается установить свою наиболее магнито – проводящую ось (d-ось) с приложенным к нему полем, чтобы минимизировать сопротивление в магнитной цепи. Иными словами, вращающееся магнитное поле статора увлекает за собой ротор. Амплитуда потока статора управляется через ось d, тогда как ток, отвечающий за момент управляется через ось q. Оси приведены к статору двигателя. В рассмотренном исполнении ротора разницы между магнитными сопротивлениями осей добиваются за счет увеличения воздушного зазора по оси q. Амплитуда момента прямо пропорциональна разнице между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент. Математически это можно выразить с некоторыми допущениями, рассмотрев формулу электромагнитного момента для синхронной явнополюсной машины без возбуждения на роторе: где m=3 для трехфазного исполнения статора, ω1- угловая скорость ротора, Xq -индуктивное сопротивление по оси q ротора, Xd – индуктивное сопротивление по оси d ротора, θ-угол между полем ротора и полем статора, характеризующий степень растянутости «магнитной пружины». Таким образом, в отличие от синхронной машины с обмоткой возбуждения, синхронная реактивная машина в классическом представлении имела меньший момент, а также невысокий коэффициент мощности и коэффициент полезного действия (КПД). Объяснялось это значительным намагничивающим током статора, так как возбуждение происходит за счет реактивной составляющей тока. Пуск таких двигателей осуществлялся за счет демпфирующей короткозамкнутой обмотки, т.е. имел место асинхронный пуск синхронного двигателя. Но на сегодняшний день, СРД успешно эксплуатируются в комплекте с преобразователями частоты (ПЧ) YASKAWA GA700. Пуск происходит благодаря алгоритму, заложенному в ПЧ (управление током намагничивания id статора и током статора, отвечающим за момент iq), следовательно, необходимость асинхронного пуска устраняется. В итоге, коэффициент мощности и КПД у современных СРД заметно увеличился, а конструкция ротора стала максимально простой. В среднем у синхронных реактивных двигателей остается худший коэффициент мощности на 5-10% из-за принципиальных особенностей работы, но на 5- 8 % лучший КПД в сравнении с асинхронными двигателями как в номинальном режиме, так и при работе на всем диапазоне скоростей при регулировании скорости вниз от номинала. Наибольший интерес у разработчиков систем электропривода вызвала конструкция СРД. Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой. То есть, статор двигателя идентичен статору широко используемого асинхронного двигателя. Особенно интересен ротор, который представляет собой вал с болванкой из шихтованной стали. На роторе отсутствуют обмотки, а также постоянные магниты.
Отличительная особенность синхронных реактивных двигателей (СРД) — отсутствие в них возбуждения со стороны ротора. Основной магнитный поток в этом двигателе создается исключительно за счет вращающейся МДС обмотки статора. Так как, СРД – синхронная машина, то его механическая характеристика в разомкнутой системе будет абсолютно жесткой.
Преимущества СРД:1. Простота и надежность ротора, состоящего из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки; 2. Низкий нагрев. Так как в роторе нет обмоток, поэтому через него не протекает активный ток с выделением тепла. Это положительно сказывается на сроке жизни подшипников, а также на коэффициенте полезного действия системы. Так как снижаются потери на нагрев, то номинальный ток двигателя может быть завышен, что позволяет получить (при аналогичной мощности) более высокий момент (на 20-40%), чем у асинхронного двигателя. 3. Отсутствие магнитов. Из-за этого снижается конечная цена двигателя, так как при производстве не используются редкоземельные элементы. 4. Низкий момент инерции ротора. Так как ротор представляет собой болванку без магнитов и обмоток, которые увеличивают этот показатель в асинхронных двигателях и двигателях с постоянными магнитами. Соответственно, уменьшается типоразмер двигателей. Из чего вытекает следующее преимущество. 5. Меньшие габариты при той же мощности в сравнении с АД. 6. Высокий КПД и cosφ (косинус фи). При работе от сети, а такие двигатели в старых системах работали от сети и снабжались дополнительной пусковой обмоткой на роторе, СРД демонстрировали не лучшие энергетические показатели, но применяя специализированный преобразователь частоты, например, YASKAWA GA700, разработанный для работы с синхронными реактивными двигателями, картина в корне меняется. В таких преобразователях происходит разделение между сетью и питающим напряжением двигателя, а программное обеспечение позволяет корректировать выходной ток, создавая наиболее благоприятные условия работы двигателя (в GA700 режим EZOLV). Таким образом СРД оставляет за собой все преимущества, описанные выше, избегая недостатков возникавших ранее при работе от сети. Если все – таки происходит снижение коэффициента мощности, это может означать, что для данного применения должен быть выбран преобразователь на больший номинальный ток. 7. Абсолютно жесткая механическая характеристика в разомкнутой системе. Это говорит о том, что двигатель способен поддерживать скорость на заданном уровне с большой точностью, до тех пор, пока момент не превысит максимальное значение. Недостатки СРД:1. Пуск и работа СРД возможны только от преобразователя частоты. Бездатчиковая система управления отслеживания положения ротора является необходимым условием работы синхронного реактивного двигателя. Преобразователь в каждый момент времени отслеживает потребляемый ток двигателя, так как при повороте вала изменяется магнитное сопротивление в зазоре, и формирует магнитное поле в соответствии с этим изменением, добиваясь высокой производительности. 2. Низкий коэффициент мощности при работе с ослаблением поля. СРД демонстрируют лучшие энергетические показатели при работе в зоне насыщения. При выходе на повышенную скорость, необходимо уменьшить ток намагничивания машины id, в результате чего, заметно упадет момент двигателя, а коэффициент мощности резко снизится в следствие потребления большего реактивного тока. Поэтому для применений в которых осуществляется работа на повышенных скоростях такие двигатели лучше не использовать. Заключение:Синхронные реактивные двигатели являются перспективным направлением для интеграции в новые системы и для модернизации старых систем электропривода. Больший КПД на всем диапазоне скоростей в сравнении с СДПМ и АД способствует в пользу выбора этого двигателя при разработке новых систем, соответствующих международному стандарту энергоэффективности IE4. Простота конструкции ротора и проверенная технология изготовления статора позволяют такому двигателю легко найти свое применение в насосных агрегатах и вентиляторах, а также в применениях с постоянным моментом и регулированием скорости вниз от номинала. Единственной проблемой такого двигателя является потребление большего реактивного тока в сравнении с асинхронными двигателями, но при использовании частотного преобразователя YASKAWA GA700 этот недостаток легко устраняется. Двухклавишный проходной выключатель: устройство + схема подключения + советы по монтажу Сэкономить на электричестве Основные параметры выпрямительных диодов Для выпрямления низкочастотных переменных токов, то есть для превращения переменного Силовые MOSFET и IGBT транзисторы, отличия и особенности их применения Технологии в области силовой Преимущества и недостатки ночного тарифа на электроэнергию Один из способов экономии — использование ночного Сервоприводы. Виды и устройство. Характеристики и применение Сервоприводы и механизмы оснащены датчиком, который отслеживает Пирометры. Виды и устройство. Измерения и применение Пирометры это приборы для определения температуры объекта |
 Появление электрического двигателя во многом способствовало развитию промышленности и улучшению качества жизни населения. В рамках второй промышленной революции произошла популяризация всех видов электрических машин, и теперь для многих создается впечатление, что эти устройства всегда находились на службе у человечества. На сегодняшний день известно множество разновидностей электрических двигателей, от широко известных двигателей постоянного тока (ДПТ), асинхронных двигателей (АД), синхронных двигателей (СД) до шаговых двигателей (ШД). Несмотря на глобальные различные, все они выполняют одну функцию – являются электромеханическими преобразователями, то есть конвертируют электрическую энергию в механическую.
Появление электрического двигателя во многом способствовало развитию промышленности и улучшению качества жизни населения. В рамках второй промышленной революции произошла популяризация всех видов электрических машин, и теперь для многих создается впечатление, что эти устройства всегда находились на службе у человечества. На сегодняшний день известно множество разновидностей электрических двигателей, от широко известных двигателей постоянного тока (ДПТ), асинхронных двигателей (АД), синхронных двигателей (СД) до шаговых двигателей (ШД). Несмотря на глобальные различные, все они выполняют одну функцию – являются электромеханическими преобразователями, то есть конвертируют электрическую энергию в механическую.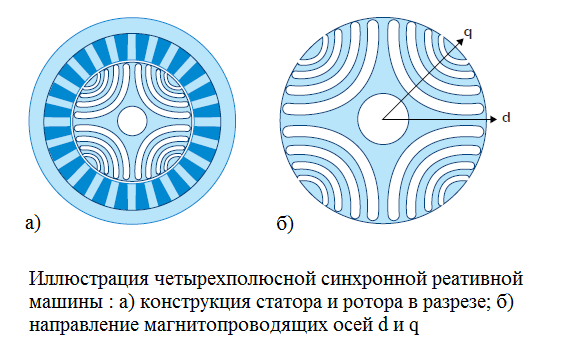
 а) Ротор с явно выраженными полюсами
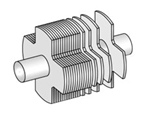
а) Ротор с явно выраженными полюсами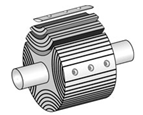 б) Аксиально-расслоенный ротор
б) Аксиально-расслоенный ротор в) Поперечно-расслоенный ротор
в) Поперечно-расслоенный ротор