Сервоприводы. Виды и устройство. Характеристики и применение
Сервоприводы и механизмы оснащены датчиком, который отслеживает определенный параметр, например усилие, положение или скорость, а также управляющий блок в виде электронного устройства. Задачей этого устройства является поддержание необходимых параметров в автоматическом режиме во время функционирования устройства, в зависимости от вида поступающего сигнала от датчика в определенные периоды времени.
Виды сервоприводов
При необходимости создания управления несколькими группами сервоприводов используют контроллеры с ЧПУ, которые собраны на схемах программируемых логических контроллеров. Такие сервоприводы способны обеспечить крутящий момент 50 Н*м, мощностью до 15 киловатт.
Синхронные способны задать скорость вращения электродвигателя с большой точностью, так же как ускорение и угол поворота. Синхронные виды приводов могут быстро достигать номинальной скорости вращения.
Асинхронные способны точно выдерживать скорость даже на очень низких оборотах.
Сервоприводы принципиально разделяют на электромеханические и электрогидромеханические . Электромеханические приводы состоят из редуктора и электродвигателя. Но их быстродействие оказывается намного меньше. В электрогидромеханических приводах движение создается путем движения поршня в цилиндре, вследствие чего быстродействие оказывается на очень высоком уровне.
Устройство и работа
От обычного электродвигателя сервопривод отличается тем, что можно задать точное положение вала в градусах. Сервоприводы – это любые механические приводы, которые включают в себя датчик некоторого параметра и блок управления, который способен автоматически поддерживать требуемые параметры, соответствующие определенным внешним значениям.

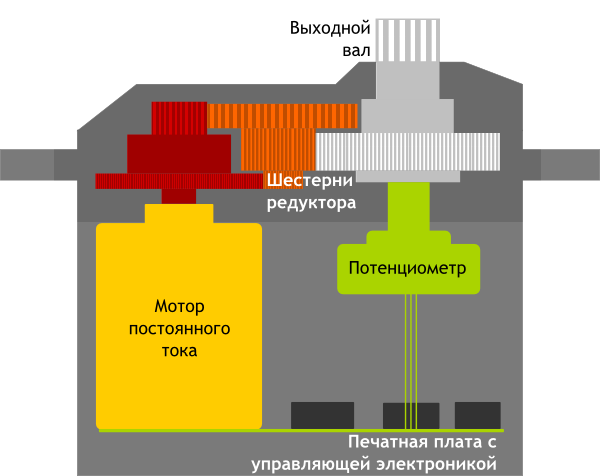
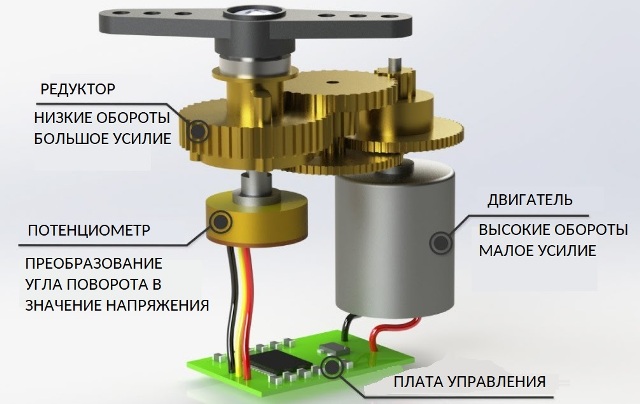
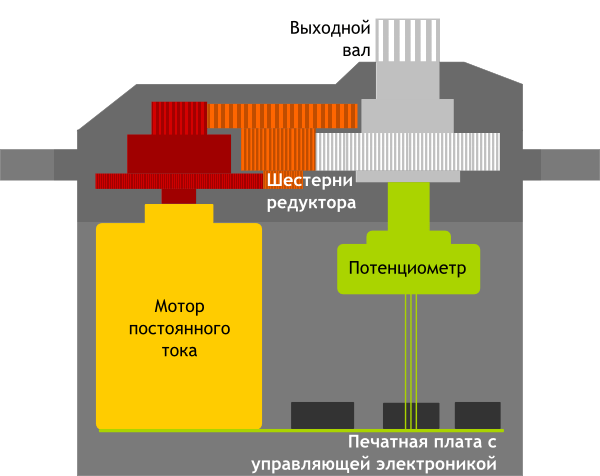
1 — Шестерни редуктора
2 — Выходной вал
3 — Подшипник
4 — Нижняя втулка
5 — Потенциометр
6 — Плата управления
7 — Винт корпуса
8 — Электродвигатель постоянного тока
9 — Шестерня электродвигателя
Для преобразования электрической энергии в механическое движение, необходим электродвигатель. Приводом является редуктор с электродвигателем. Редуктор требуется для снижения скорости двигателя, так как скорость слишком большая для применения. Редуктор состоит из корпуса, в котором расположены валы с шестернями, способными преобразовывать и передавать крутящий момент.

Путем запуска и останова электродвигателя можно приводить в движение выходной вал редуктора, который связан с шестерней сервопривода. К валу можно присоединять устройство или механизм, которым требуется управлять. Кроме этого для контроля положения вала требуется наличие датчика обратной связи. Этот датчик может преобразовать угол поворота снова в сигнал электрического тока.
Такой датчик получил название энкодера. В качестве энкодера может применяться потенциометр. Если бегунок потенциометра поворачивать, то будет изменяться его сопротивление. Значение этого сопротивления прямо пропорционально зависит от угла поворота потенциометра. Таким образом, есть возможность добиться установки определенного положения механизма.
Кроме выше названного потенциометра, редуктора и электродвигателя, сервоприводы оснащены электронной платой, которая обрабатывает поступающий сигнал внешнего значения параметра от потенциометра, сравнивает, и в соответствии с результатом сравнения запускает или останавливает электродвигатель. Другими словами эта электронная начинка отвечает за поддержку отрицательной обратной связи.
Подключение сервопривода осуществляется тремя проводниками, два из которых подают питание напряжением электродвигателя, а по третьему проводнику поступает сигнал управления, с помощью которого выполняется установка положения вала двигателя.
Кроме электродвигателя, играть роль привода может и другой механизм, например пневматический цилиндр со штоком. В качестве датчика обратной связи применяют также датчики поворота угла, либо датчик Холла. Управляющий блок является сервоусилителем, частотным преобразователем, индивидуальным инвертором. Он может содержать также и датчик сигнала управления.
При необходимости создания плавного торможения или разгона для предотвращения чрезмерных динамических нагрузок двигателя, выполняют схемы более сложных микроконтроллеров управления, которые могут контролировать позицию рабочего элемента намного точнее. Подобным образом выполнено устройство привода установки позиции головок в компьютерных жестких дисках.
Характеристики сервоприводов
Основные параметры, которые характеризуют сервоприводы:
- Усилие на валу. Этот параметр является крутящим моментом. Это наиболее важный параметр сервопривода. В паспортных данных чаще всего указывается несколько значений момента для разных величин напряжения.
- Скорость поворота также является важной характеристикой. Она указывается в эквиваленте времени, необходимом для изменения позиции выходного вала привода на 60 градусов. Этот параметр также могут указывать для нескольких значений напряжения.
- Тип сервоприводов бывает аналоговый или цифровой.
- Питание. Основная часть сервоприводов функционирует на напряжении 4,8-7,2 вольта. Питание подается чаще всего по трем проводникам: белый – сигнал управления, красный – напряжение работы, черный – общий провод.
- Угол поворота – это наибольший угол, на который выходной вал способен повернуться. Чаще всего этот параметр равен 180 или 360 градусов.
- Постоянного вращения. При необходимости обычный сервопривод можно модернизировать для постоянного вращения.
- Материал изготовления редуктора сервоприводов бывает различным: карбон, металл, пластик, либо комбинированный состав. Шестерни, выполненные из пластика, не выдерживают ударных нагрузок, однако обладают высокой износостойкостью. Карбоновые шестерни намного прочнее пластмассовых, но имеют высокую стоимость. Шестерни из металла способны выдержать значительные нагрузки, падения, но имеют низкую износостойкость. Выходной вал редуктора устанавливают по-разному на разных моделях: на втулках скольжения, либо на шариковых подшипниках.

Преимущества
- Легкость и простота установки конструкции.
- Безотказность и надежность, что важно для ответственных устройств.
- Не создают шума при эксплуатации.
- Точность и плавность передвижений достигается даже на малых скоростях. В зависимости от поставленной задачи разрешающая способность может настраиваться работником.
Недостатки
- Сложность в настройке.
- Повышенная стоимость.
Применение
Сервоприводы в настоящее время используются достаточно широко. Так, например, они применяются в различных точных приборах, промышленных роботах, автоматах по производству печатных плат, станках с программным управлением, различные клапаны и задвижки.
Наиболее популярными стали быстродействующие приводы в авиамодельном деле. Серводвигатели имеют достоинство в эффективности расхода электрической энергии, а также равномерного движения.
В начале появления серводвигателей использовались коллекторные трехполюсные моторы с обмотками на роторе, и с постоянными магнитами на статоре. Кроме этого, в конструкции двигателя был узел с коллектором и щетками. Далее, по мере технического прогресса число обмоток двигателя увеличилось до пяти, а момент вращения возрос, так же как и скорость разгона.
Следующим этапом развития серводвигателей было расположение обмоток снаружи магнитов. Этим снизили массу ротора, уменьшили время разгона. При этом стоимость двигателя увеличилась. В результате дальнейшего проектирования серводвигателей было решено отказаться от наличия коллектора в устройстве двигателя. Стали применяться двигатели с постоянными магнитами ротора. Мотор стал без щеток, эффективность его возросла вследствие увеличения крутящего момента, скорости и ускорения.
В последнее время наиболее популярными стали сервомоторы, работающие от программируемого контроллера (Ардуино). Вследствие этого открылись большие возможности для проектирования точных станков, роботостроения, авиастроения (квадрокоптеры).
Так как приводы с моторами без коллекторов обладают высокими функциональными характеристиками, точным управлением, повышенной эффективностью, они часто применяются в промышленном оборудовании, бытовой технике (мощные пылесосы с фильтрами), и даже в детских игрушках.
Сервопривод отопления
По сравнению с механической регулировкой системы отопления, электрические сервоприводы являются наиболее совершенными и прогрессивными техническими устройствами, обеспечивающими поддержание параметров отопления помещений.

1 — Блок питания
2 — Комнатные термостаты
3 — Коммутационный блок
4 — Серводвигатели
5 — Подающий коллектор
6 — Обход
7 — Водяной теплый пол
8 — Обратный коллектор
9 — Датчик температуры воды
10 — Циркулярный насос
11 — Шаровый клапан
12 — Регулировочный клапан
13 — Двухходовой термостатический клапан
Привод системы отопления функционирует совместно с термостатом, установленным на стену. Кран с электрическим приводом монтируется на трубе подачи теплоносителя, перед коллектором теплого водяного пола. Далее выполняется подключение питания 220 вольт и настройка терморегулятора рабочего режима.
Система управления оснащается двумя датчиками. Один из них расположен в полу, другой в помещении. Датчики передают сигналы на термостат, управляющий сервоприводом, который соединен с краном. Повысить точность регулировки можно путем установки дополнительного прибора снаружи помещения, так как условия климата непрерывно изменяются, и оказывают влияние на температуру в комнате.
Привод механически соединен с клапаном для его управления. Клапаны могут быть двух- и трехходовыми. Двухходовой клапан может изменять температуру воды в системе. Трехходовой клапан способен поддерживать температуру неизменной, однако изменяет потребление горячей воды, которая подается в контуры. В устройстве трехходового клапана имеется два входа для горячей воды (трубы подачи) и выход обратной воды, через который подается смешанная вода с заданной температурой.

Смешивание воды происходит с помощью клапана. При этом осуществляется регулировка подачи теплоносителя в коллекторы. При открывании одного входа, другой начинает закрываться, а расход воды на выходе не изменяется.
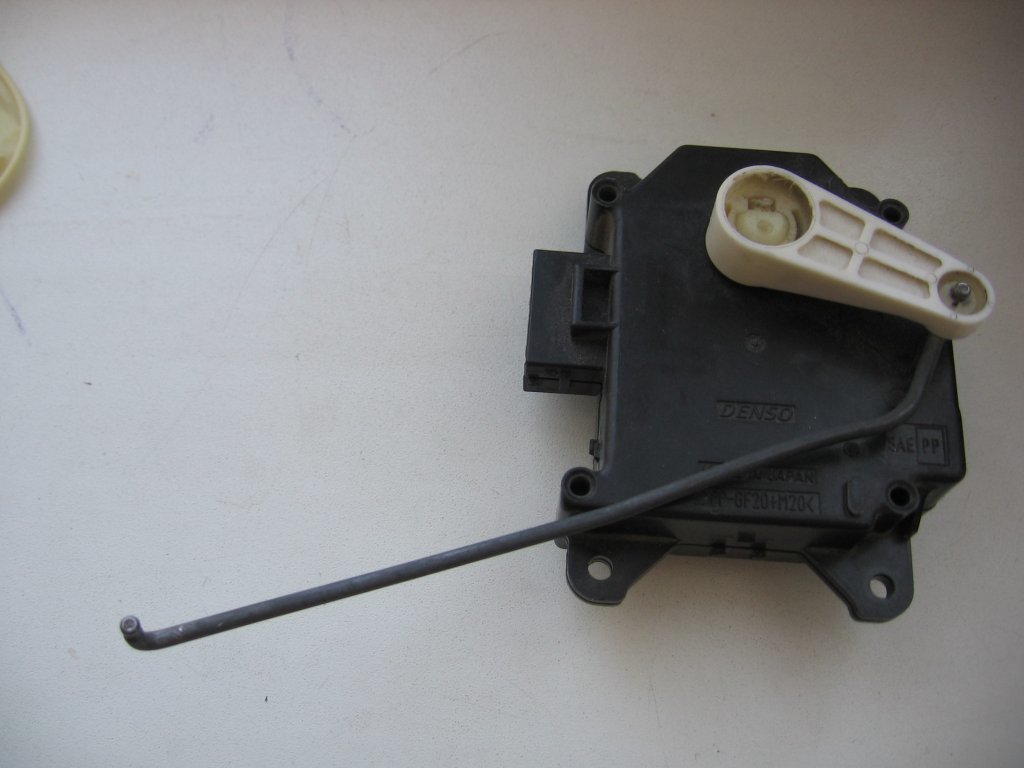
Сервоприводы багажника
В настоящее время современные автомобили чаще всего стали производит с функцией автоматического открывания багажника. Для такой цели применяют рассмотренную нами конструкцию сервопривода. Автопроизводители используют два метода для оснащения такой функцией автомобиля.
Конечно, пневмопривод багажника более надежен, однако его стоимость достаточно высока, поэтому в автомобилях такой привод не нашел применения.
Электрический привод выполняется с разными способами управления:
- Рукояткой на крышке багажника.
- Кнопкой на панели двери водителя.
- С пульта сигнализации.
Открывать багажник вручную не всегда бывает удобным. Например, зимой замок имеет свойство замерзать. Сервопривод дополнительно выполняет функцию защиты автомобиля от чужого проникновения, так как совмещен с устройством замка.
Такие приводы багажника используются на некоторых импортных автомобилях, однако, можно установить такой механизм и на отечественных машинах, было бы желание.
Существуют приводы багажника с магнитными пластинами, однако они не нашли применения, так как их устройство достаточно сложное.

Наиболее приемлемыми по цене являются сервоприводы багажника, которые выполняют только открывание. Функция закрывания для них недоступна. Также можно выбрать конструкцию модели привода, имеющего инерционный механизм. Он играет роль блокировки при появлении препятствия при движении багажника.

Дорогостоящие модели сервоприводов включают в себя механизм подъема и опускания багажника, доводчика механизма запирания, датчиков и контроллера. Обычно их на автомобилях устанавливают на заводе, однако простые конструкции вполне можно монтировать самостоятельно.
Сервоприводы: подключение, управление, скетчи Ардуино
В данной статье рассматриваются сервоприводы: их устройство, предназначение, подсказки по подключению и управлению, разновидности сервоприводов и их сравнение. Давайте приступим и начнём с того, что же такое сервопривод.
Понятие сервопривода
Под сервоприводом чаще всего понимают механизм с электромотором, который можно попросить повернуться в заданный угол и удерживать это положение. Однако, это не совсем полное определение.
Если сказать полнее, сервопривод — это привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервоприводом является любой тип механического привода, имеющий в составе датчик (положения, скорости, усилия и т.п.) и блок управления приводом, автоматически поддерживающий необходимые параметры на датчике и устройстве согласно заданному внешнему значению.
Наиболее распространены сервоприводы, которые удерживают заданный угол, и сервоприводы, поддерживающие заданную скорость вращения.
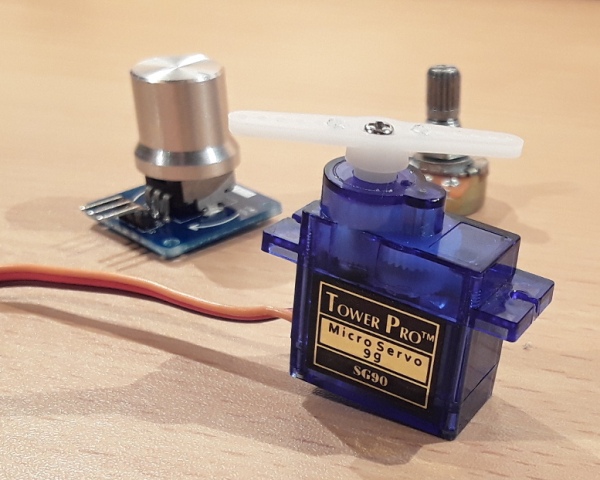
Типичный хобби-сервопривод изображён ниже.

Каким же образом устроены сервоприводы?
Устройство сервопривода
Сервоприводы имеют несколько составных частей.
Привод — электромотор с редуктором. Чтобы преобразовать электричество в механический поворот, необходим электромотор. Однако зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять. Однако, для того чтобы положение контролировалось устройством, необходим датчик обратной связи — энкодер, который будет преобразовывать угол поворота обратно в электрический сигнал. Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора, третий доставляет управляющий сигнал, который используется для выставления положения устройства.
Теперь давайте посмотрим, как управлять сервоприводом извне.
Управление сервоприводом. Интерфейс управляющих сигналов
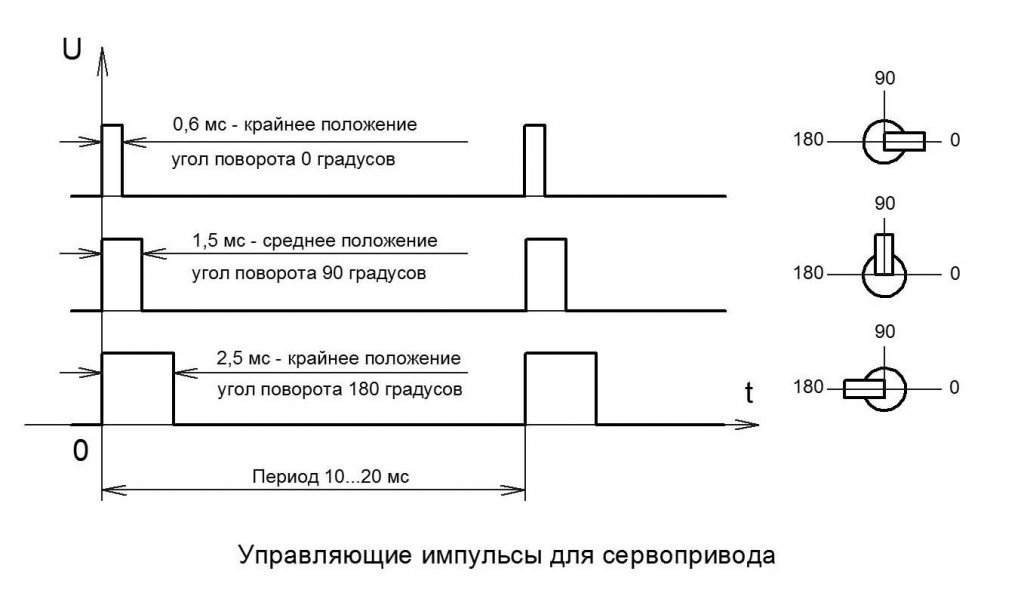
Чтобы указать сервоприводу желаемое положение, по предназначенному для этого проводу необходимо посылать управляющий сигнал. Управляющий сигнал — импульсы постоянной частоты и переменной ширины.
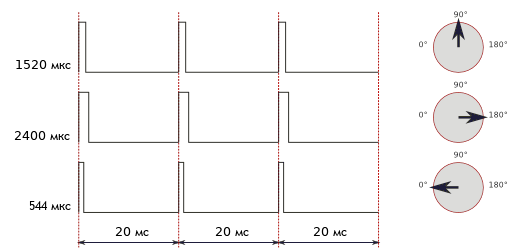
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал поступает в управляющую схему, имеющийся в ней генератор импульсов производит свой импульс, длительность которого определяется через потенциометр. Другая часть схемы сравнивает длительность двух импульсов. Если длительность разная, включается электромотор. Направление вращения определяется тем, какой из импульсов короче. Если длины импульсов равны, электромотор останавливается.
Чаще всего в хобби-сервах импульсы производятся с частотой 50 Гц. Это значит, что импульс испускается и принимается раз в 20 мс. Обычно при этом длительность импульса в 1520 мкс означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса заставит сервопривод повернуться по часовой или против часовой стрелки соответственно. При этом существуют верхняя и нижняя границы длительности импульса. В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мкс — для 0° и 2400 мкс — для 180°.
Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Также стоит отметить, что это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов немного отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
На что ещё стоит обратить внимание, так это на путаницу в терминологии. Часто способ управления сервоприводами называют PWM/ШИМ (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation). В нём крайне важна длина импульсов и не так важна частота их появления. 50 Гц — это норма, но сервопривод будет работать корректно и при 40, и при 60 Гц. Единственное, что нужно при этом иметь в виду — это то, что при сильном уменьшении частоты он может работать рывками и на пониженной мощности, а при сильном завышении частоты (например, 100 Гц) может перегреться и выйти из строя.
Характеристики сервоприводов
Теперь давайте разберёмся, какие бывают сервоприводы и какими характеристиками они обладают.
Крутящий момент и скорость поворота
Сначала поговорим о двух очень важных характеристиках сервопривода: о крутящем моменте и о скорости поворота.
Момент силы, или крутящий момент — векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
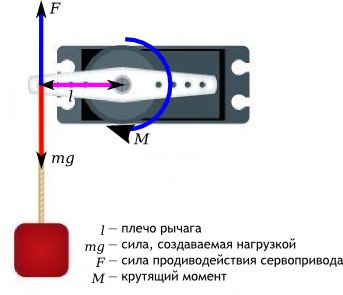
Проще говоря, эта характеристика показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость сервопривода измеряется интервалом времени, который требуется рычагу сервопривода, чтобы повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё несложно вычислить скорость в более привычной величине, оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют такую единицу.
Стоит отметить, что иногда приходится искать компромисс между этими двумя характеристиками, так как если мы хотим надёжный, выдерживающий большой вес сервопривод, то мы должны быть готовы, что эта могучая установка будет медленно поворачиваться. А если мы хотим очень быстрый привод, то его будет относительно легко вывести из положения равновесия. При использовании одного и того же мотора баланс определяет конфигурация шестерней в редукторе.
Конечно, мы всегда можем взять установку, потребляющую большую мощность, главное, чтобы её характеристики удовлетворяли нашим потребностям.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов. Их можно разделить на:
Обладают они при этом следующими характерными габаритами:
| Вес | Линейные размеры | |
|---|---|---|
| маленькие | 8-25 г | 22×15×25 мм |
| стандартные | 40-80 г | 40×20×37 мм |
| большие | 50-90 г | 49×25×40 мм |
Бывают ещё так называемые сервоприводы «специального вида» с габаритами, не попадающими в данную классификацию, однако процент таких сервоприводов весьма мал.
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
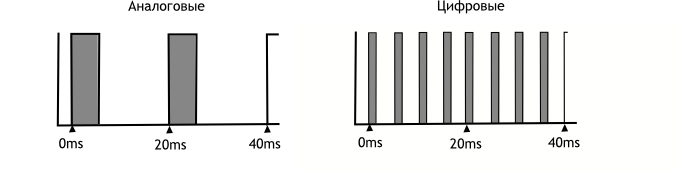
Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Материалы шестерней
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические. Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.
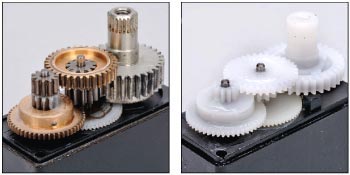
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостатой — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. К сожалению, они обойдутся вам достаточно дорого.
Коллекторные и бесколлекторные моторы
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
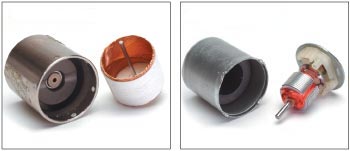
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
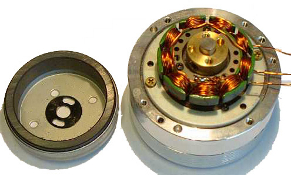
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
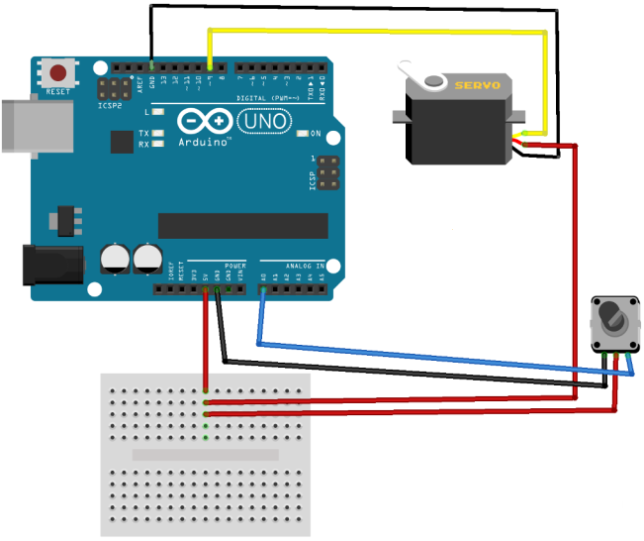
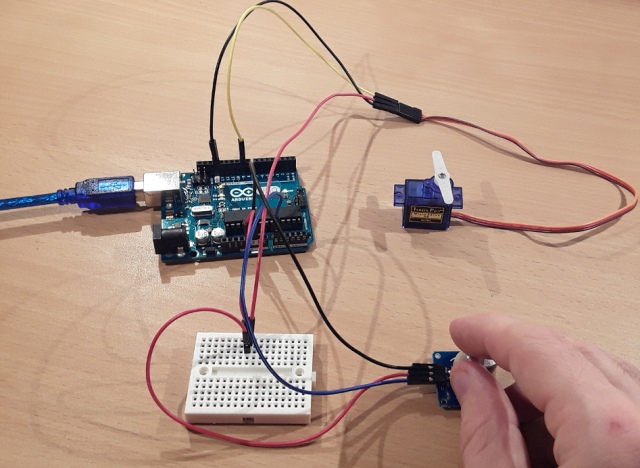
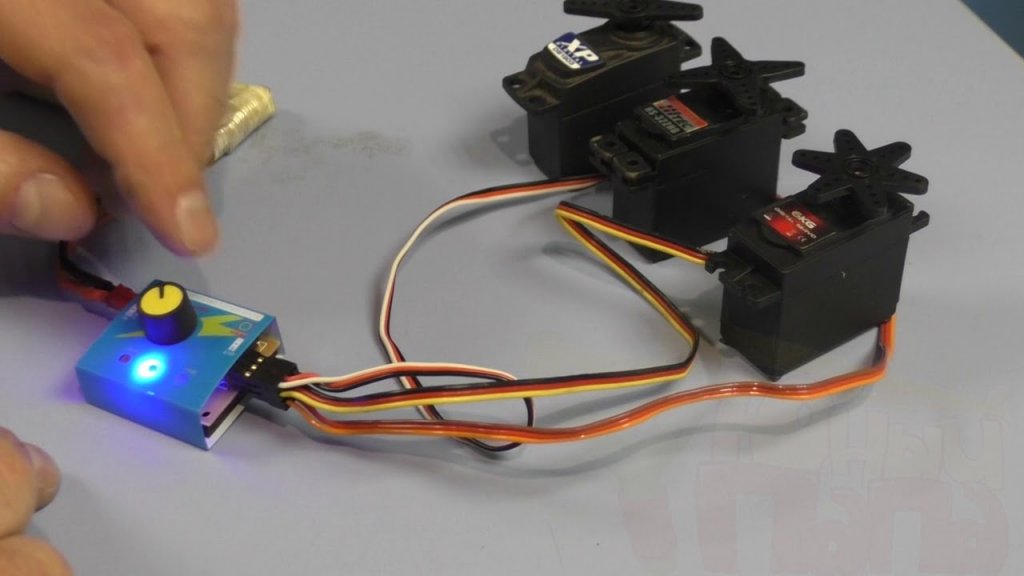
Подключение к Arduino
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo .
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода: 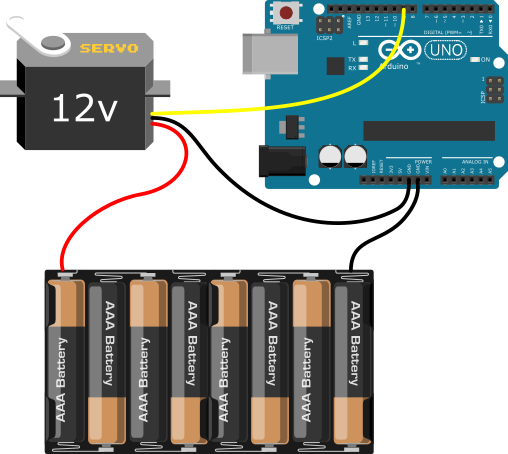
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Функционал библиотеки Servo
Библиотека Servo позволяет осуществлять программное управление сервоприводами. Для этого заводится переменная типа Servo . Управление осуществляется следующими функциями:
Пример использования библиотеки Servo
По аналогии подключим 2 сервопривода
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками/ передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2 . Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Вместо заключения
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
Сервопривод
В конструкциях оборудования, создаваемого на базе высоких технологий, постоянно развиваются и совершенствуются различные автоматические процессы. Среди них широкое распространение получил сервопривод, устанавливаемый с целью совершения отдельными элементами и деталями постоянных динамических движений. Эти устройства обеспечивают постоянный контроль над углами поворота вала, устанавливают нужную скорость в приборах электромеханического типа.
Составной частью этих систем являются серводвигатели, которые дают возможность управлять скоростями в нужном диапазоне в установленный промежуток времени. Таким образом, все процессы и движения могут периодически повторяться, а частота этих повторов закладывается в системе управления.
Устройство сервопривода
Основные детали, из которых состоит типовой серводвигатель – ротор и статор. Для коммутации применяются специальные комплектующие в виде штекеров и клеммных коробок. Управление, контроль и коррекция процессов осуществляется с помощью отдельного управляющего узла. Для включения и выключения сервопривода используется отдельная система. Все детали, помещаются в общем корпусе.
Практически во всех сервоприводах имеется датчик, работающий и отслеживающий определенные параметры, такие как положение, усилие или скорость вращения. С помощью управляющего блока поддерживается автоматический режим необходимых параметров при работе устройства. Выбор того или иного параметра происходит в зависимости от сигналов, поступающих от датчика в установленные промежутки времени. 
Разница между сервоприводом и обычным электродвигателем заключается в возможности установки вала в точно заданное положение, измеряемое в градусах. Установленное положение, так же, как и другие параметры, поддерживаются блоком управления.
Их принцип работы заключается в преобразовании электрической энергии в механическую, с помощью электродвигателя. В качестве привода используется редуктор, позволяющий снизить скорость вращения до требуемого значения. В состав данного устройства входят валы с шестернями, преобразующими и передающими крутящий момент.
Как работает сервопривод
Вращение выходного вала редуктора, связанного шестернями с сервоприводом, осуществляется путем запуска и остановки электродвигателя. Сам редуктор необходим для регулировки числа оборотов. Выходной вал может быть соединен с механизмами или устройствами, которыми необходимо управлять. Положение вала контролируется с помощью датчика обратной связи, способного преобразовывать угол поворота в электрические сигналы и на котором построен принцип работы всего устройства.

Этот датчик известен также, под названием энкодера или потенциометра. При повороте бегунка, его сопротивление будет изменяться. Изменения сопротивления находится в прямой пропорциональной зависимости с углом поворота энкодера. Данный принцип работы позволяет устанавливать и фиксировать механизмы в определенном положении.
Дополнительно каждый серводвигатель имеет электронную плату, обрабатывающую внешние сигналы, поступающие от потенциометра. Далее выполняется сравнение параметров, по результатам которого производится запуск или остановка электродвигателя. Следовательно, с помощью электронной платы поддерживается отрицательная обратная связь.

Подключить серводвигатель можно с помощью трех проводников. По двум из них подается питание к электродвигателю, а третий служит для прохождения сигналов управления, приводящих вал в определенное положение.
Предотвратить чрезмерные динамические нагрузки на электродвигатель возможно с помощью плавного разгона или такого же плавного торможения. Для этого применяются более сложные микроконтроллеры, обеспечивающие более точный контроль и управление позицией рабочего элемента. В качестве примера можно привести жесткий диск компьютера, в котором головки устанавливаются в нужную позицию с помощью точного привода.
Управление серводвигателем
Основное условие, чтобы серводвигатель мог нормально работать, заключается в их функционировании совместно с так называемой системой G-кодов. Эти коды представляют собой набор команд управления, заложенный в специальную программу.
Если в качестве примера взять ЧПУ – числовое программное управление, то в данном случае сервоприводы будут взаимодействовать с преобразователями. В соответствии с уровнем входного напряжения они способны изменить значение напряжения на возбуждающей обмотке или якоре электродвигателя.

Непосредственное управление серводвигателем и всей системой осуществляется из одного места – блока управления. Когда отсюда поступает команда на прохождение определенного расстояния по оси координат Х, в цифровом аналоговом преобразователе возникает напряжение определенной величины, которое и поступает в качестве питания привода этой координаты. В серводвигателе начинается вращательное движение ходового винта, связанного с энкодером и исполнительным органом основного механизма.
В энкодере вырабатываются импульсы, подсчитываемые блоком, выполняющим управление сервоприводом. В программе заложено соответствие определенного количества сигналов с энкодера, установленному расстоянию, которое должен пройти исполняющий механизм. В нужное время аналоговый преобразователь, получив установленное число импульсов, прекращает выдачу выходного напряжения, в результате, серводвигатель останавливается. Точно так же под влиянием импульсов восстанавливается напряжение, и возобновляется работа всей системы.
Виды и характеристики
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и бесколлекторные, предназначенные для работы от постоянного и переменного тока.
Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.

В зависимости от принципиальной схемы и конструкции, сервоприводы могут быть электромеханическими и электрогидромеханическими. Первый вариант, включающий редуктор и двигатель, отличается низким быстродействием. Во втором случае действие происходит очень быстро за счет движения поршня в цилиндре.
Каждый сервопривод характеризуется определенными параметрами:
- Крутящий момент или усилие, создаваемое на валу. Считается наиболее важным показателем работы сервопривода. Для каждой величины напряжения существует собственный крутящий момент, отражаемый в паспорте изделия.
- Скорость поворота. Данный параметр представляет собой определенный период времени, который требуется, чтобы изменить позицию выходного вала на 600. Эта характеристика также зависит от конкретного значения напряжения.
- Максимальный угол поворота, на который может развернуться выходной вал. Чаще всего эта величина составляет 180 или 3600.
- Все сервоприводы разделяются на цифровые и аналоговые. В зависимости от этого и осуществляется управление сервоприводом.
- Питание серводвигателей. В большинстве моделей используется напряжение от 4,8 до 7,2В. Питание и управление осуществляется с помощью трех проводников.
- Возможность модернизации в сервопривод постоянного вращения.
- Материалы для редуктора могут использоваться самые разные. Шестерни изготавливаются из металла, карбона, пластика или комбинированных составов. Каждый из них обладает своими преимуществами и недостатками. Например, пластиковые детали плохо выдерживают ударные нагрузки, но устойчивы к износу в процессе длительной эксплуатации. Металлические шестерни, наоборот, быстро изнашиваются, зато они обладают высокой устойчивостью к динамическим нагрузкам.
Плюсы и минусы сервомоторов
Благодаря унифицированным размерам, эти устройства легко и просто устанавливаются в любые конструкции. Они безотказны и надежны, каждый из них работает практически бесшумно, что имеет большое значение при их эксплуатации на сложных и ответственных участках. Даже на невысоких скоростях можно добиться точности и плавных перемещений. Каждый сервопривод может быть настроен персоналом, в зависимости решения тех или иных задач.
В качестве недостатков отмечаются определенные сложности при настройках и сравнительно высокая стоимость.

Сервопривод для теплого пола

Управление шаговым двигателем

ЩСУ – щит станций управления

Ремонт люстры с пультом управления

Шаговый двигатель. Принцип работы

Принцип работы частотного преобразователя для асинхронного двигателя
Как устроен и работает сервопривод
Слаботочные сервоприводы под управлением ардуино (micro servo motor) широко применяются сегодня в любительской робототехнике, на их основе делают небольшие настольные станки и множество других интересных и полезных в хозяйстве вещей. Даже просто на уровне хобби такие сервоприводы находят массу разнообразных применений. Давайте посмотрим, что же такое сервопривод в простейшем виде, как он принципиально устроен и как работает.
Само слово «сервопривод» можно перевести как «следящий привод». То есть это такое приводящее устройство, которое содержит в себе двигатель, управляемый посредством отрицательной обратной связи, что позволяет осуществлять точные движения с выверенным позиционированием рабочего органа.
В принципе сервоприводом можно назвать электродвигатель, в системе управления которым имеется датчик положения рабочего устройства (или просто вала), текущие параметры с которого определяют то, как, куда и на сколько должен или не должен повернуться ротор мотора для получения нужного результата. Обычно в такой системе имеется блок управления приводом, который анализирует параметры с датчика, и в соответствии с ними управляет питанием двигателя.
Таким образом, сервопривод хотя и работает автоматически, процесс позиционирования рабочего органа оказывается при этом очень точным благодаря правильной обработке сигнала с датчика платой управления. Например целью управления может быть просто поддержание определенного значения конкретного параметра упомянутого датчика. Вот и становится понятно, почему привод называется следящим — он следит за состоянием датчика.
Двигатель с установленным редуктором может иметь всего три или четыре провода, идущих от него. По двум проводам подается питание на двигатель, с третьего — снимается сигнал от датчика, четвертый может быть предназначен для питания датчика.
Обычно провода питания имеют красный и черный или красный и коричневый цвета — это плюсовой и минусовой (земля) провода питания. Белый или желтый — сигнальный провод с датчика, через этот провод на плату управления приходит сигнал обратной связи о текущем состоянии системы.
Простой сервопривод с редуктором (сервомашинка) и потенциометром — замечательный пример для того чтобы понять принцип работы обратной связи в системе управления сервоприводом.
Потенциометр имеет три вывода. На те выводы что по бокам — подается питание, а средний по сути — выход с резистивного делителя напряжения. Если изменить положение ручки потенциометра, то величина напряжения между минусом питания и средним его выводом измениться пропорционально изменению сопротивления между минусом и средним выводом.
Допустим, в крайнем левом положении напряжение на среднем выводе потенциометра будет минимальным, а в крайнем правом — максимальным. Получается что напряжение на среднем выводе потенциометра определяется положением его ручки, то есть тем, на какой угол она повернута от исходного положения, в котором напряжение на среднем выводе минимально. Обычно используют потенциометры с номинальным сопротивлением 5-10 кОм.
И как же здесь работает сервопривод? Ручка потенциометра в данном сервоприводе через редуктор соединена с валом двигателя. Значит, когда двигатель работает и его ротор вращается, ручка потенциометра поворачивается и следовательно сопротивление на среднем его выводе изменяется.
В крайнем левом положении, например, на среднем выводе будет 0 вольт, в среднем положении — 2,5 вольт, а в крайнем правом — 5 вольт. Для упрощения примем, что ручка потенциометра способна вращаться вокруг своей оси на 180 градусов, значит 2,5 вольта на среднем выводе будет соответствовать повороту ручки на 90 градусов.
Если плата управления получает информацию, что на среднем выводе 5 вольт, а необходимо создать поворот до 90 градусов, то к двигателю начнет автоматически подаваться питание определенной полярности до тех пор, пока он, поворачивая выход редуктора (а в месте с ним и ручку потенциометра) справа – налево, не доведет потенциометр до требуемого положения. Как только на среднем выводе потенциометра станет 2,5 вольт, двигатель прекратит получать питание от платы управления.
Аналогичным образом будет реализован поворот в другую сторону: если на среднем выводе 0 вольт, то полярность питания двигателя будет такой, что ручка потенциометра станет поворачиваться через редуктор слева — направо, пока напряжение не достигнет 2,5 вольт, соответствующих повороту ручки на 90 градусов. Это достаточно грубый пример, зато он достаточно нагляден.

Редуктор здесь необходим для того, чтобы высокие обороты вала маломощного мотора преобразовать в малые обороты с большим усилием, что позволит, во-первых, провернуть потенциометр, во-вторых, сделать это медленно и точно. Редуктор состоит из шестеренок, на валу двигателя находится маленькая, которая вращает большую, в центре которой маленькая и т. д.
Сервоприводы характеризуются несколькими главными параметрами. Первый главный параметр — усилие на валу (вращающий момент, деленный на ускорение свободного падения), которое измеряется у маленьких моделей в кг/см и определяется при номинальном напряжении питания мотора. Например, вращающий момент в 10 кг/см означает, что при расстоянии до оси выходного вала в 1 см, на нем можно удержать груз массой 10 кг.
Второй немаловажный параметр — скорость поворота, которая указывается в сек/60 градусов. Этот параметр показывает, сколько времени требуется сервоприводу для поворота его выходного вала на 60 градусов. Например 0,2сек/60 градусов. Далее идут такие параметры как напряжение питания, угол вращения (180 или 360 градусов) и тип редуктора (материал шестерней).
Сервопривод
Принцип работы
Вентильные электродвигатели
Вентильные двигатели – это синхронные бесколлекторные (бесщёточные) машины. На роторе находятся постоянные магниты из редкоземельных металлов, на статоре – якорная обмотка. Коммутация обмоток статора осуществляется полупроводниковыми силовыми ключами (транзисторами) так, чтобы вектор магнитного поля статора был всегда перпендикулярен вектору магнитного поля ротора – для этого используется датчик положения ротора (датчик Холла или энкодер). Фазный ток регулируется с помощью ШИМ-модуляции и может иметь трапецеидальную или синусоидальную форму.
Линейные серводвигатели
Плоский ротор линейного двигателя сделан из редкоземельных постоянных магнитов. По принципу действия он похож на вентильный двигатель.
Шаговые электродвигатели
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления – их коммутация выполняется внешним приводом.
Рассмотрим принцип работы реактивного шагового двигателя, у которого на полюсах статора расположены зубцы, а ротор выполнен из магнитомягкой стали и тоже имеет зубцы. Зубцы на статоре расположены так, что на одном шаге магнитное сопротивление меньше по продольной оси двигателя, а на другом – по поперечной. Если дискретно возбуждать в определённой последовательности обмотки статора постоянным током, то ротор при каждой коммутации будет поворачиваться на один шаг, равный шагу зубцов на роторе.
Сервопривод
Некоторые модели преобразователей частоты могут работать как со стандартными асинхронными двигателями, так и с серводвигателями. То есть основное отличие сервоприводов не в силовой части, а в алгоритме управления и скорости вычислений. Поскольку в программе используется информация о положении ротора, то у сервопривода есть интерфейс для подключения энкодера, установленного на валу двигателя.
Сервоконтроллер
В сервосистемах используется принцип подчинённого управления: контур тока подчинён контуру скорости, который в свою очередь подчинён контуру положения (см. теорию автоматического управления). Сначала настраивается самый внутренний контур – контур тока, потом – контур скорости и самым последним настраивается контур положения.
Контур тока всегда реализован в сервоприводе.
Контур скорости (как и датчик скорости) также всегда присутствует в сервосистеме, он может быть реализован как на базе встроенного в привод сервоконтроллера, так и внешнего.
Контур положения используется для точного позиционирования (например, осей подач в станках с ЧПУ). Если в кинематических связях между исполнительным органом (координатным столом) и валом двигателя нет люфтов, то координата косвенно пересчитывается по значению кругового датчика. Если люфты есть, то на исполнительный орган устанавливается дополнительный датчик положения (который подключается к сервоконтроллеру) для прямого измерения координаты. Те есть, в зависимости от конфигурации контуров скорости и положения подбирается соответствующий сервоконтроллер и сервопривод (не в любом сервоконтроллере можно реализовать контур положения!).
Как выбрать сервопривод
Основные функции сервосистем
- Позиционирование (Positioning)
- Интерполяция (Interpolation)
- Синхронизация, электронный редуктор (Gear)
- Точное поддержание скорости вращения (шпиндель станка)
- Электронный кулачок (Cam)
- Программируемый логический контроллер.
Компоненты сервосистемы
В общем случае сервосистема (Motion Control System) может состоять из следующих устройств:
- Серводвигатель (Servo Motor) с круговым датчиком обратной связи по скорости (он же может выполнять функцию датчика положения ротора)
- Серворедуктор (Servo Gear)
- Датчик положения исполнительного механизма (например, линейный датчик координаты оси подач)
- Сервопривод (Servo Drive)
- Сервоконтроллер (Motion Controller)
- Операторский интерфейс (HMI).
Варианты аппаратно-программной реализации сервосистемы
- Сервосистема на базе ПЛК (PLC-based Motion Control)
- Функциональный модуль управления перемещением добавляется в корзину расширения ПЛК
- Автономный сервоконтроллер
- Сервосистема на базе ПК (PC-based Motion Control)
- Специальный софт Motion Control для планшетного ПК с пользовательским интерфейсом (HMI)
- Programmable Automation controller (PAC) с функцией управления перемещением
- Сервосистема на базе привода (Drive-based Motion Control)
- Преобразователь частоты со встроенным сервоконтроллером
- Опциональное программное обеспечение, которое загружается в привод и дополняет его функциями управления движением
- Опциональные платы с функциями управления движением, которые встраиваются в привод.
Типы серводвигателей
- Синхронные
Компактные бесщёточные серводвигатели с возбуждением от постоянных магнитов (вентильные), обеспечивающие высокую динамику и точность.
Асинхронные
Приводы главного движения и шпинделей инструментальных станков.
Прямой привод (Direct Drive)
Прямой привод не содержит промежуточных передаточных механизмов (шарико-винтовых пар, ремней, редукторов):
- Линейные двигатели (Linear Motors) могут поставляться вместе с профильными рельсовыми направляющими
- Моментные двигатели (Torque Motors) – синхронные многополюсные машины с возбуждением от постоянных магнитов, с жидкостным охлаждением, ротор с полым валом. Обеспечивают высокую точность и мощность на низких оборотах.
Преимущества серводвигателей
- Высокое быстродействие, динамика и точность позиционирования
- Высокомоментные
- Малоинерционные
- Большая перегрузочная способность по моменту
- Широкий диапазон регулирования
- Бесщёточные.
Преимущества линейных приводов
Отсутствие кинематических цепей для преобразования вращательного движения в линейное:
- Меньше инерционность
- Нет зазоров
- Меньше температурные и упругие деформации
- Меньше износ и снижение точности при эксплуатации
- Меньше потери на трение – выше КПД.
Точность
Микронная точность требуется в металлообрабатывающих станках с ЧПУ, а в штабелёрах достаточно и сантиметра. От точности зависит выбор серводвигателя и сервопривода.
- Точность позиционирования
- Точность поддержания скорости
- Точность поддержания момента.
Сервопривод: что это такое, как работает серводвигатель и для чего нужен – принцип работы и устройство
Обратимся к механизму, устанавливаемому в целый ряд станков и активно задействованному в автоматизации производственных процессов. Рассмотрим что значит сервопривод: устройство и принцип работы, схемы и сферы применения – все это и другие важные моменты в фокусе нашего внимания. Ознакомившись с информацией, вы будете знать, что из себя представляет данный силовой агрегат, чем он отличается от других типов, почему и когда его следует использовать.
Сразу уточним: его востребованность не ограничивается промышленным сектором, он нужен не только оборудованию. Функционирует и в приборах отопления, и в системах кондиционирования, в машинах и даже в любительских радиоустановках. Актуален везде, где необходимо задавать движение и регулировать ускорение или замедление.
Сервопривод – что это такое
Под этим понятием обычно подразумевают оснащенный электромотором механизм, который можно разместить под нужным углом и зафиксировать в одном положении. Но данное определение недостаточно емкое, поэтому его можно и нужно дополнить.
Это также силовой агрегат, управление которым реализовано через отрицательную обратную связь. Именно последняя дает возможность чутко контролировать заданные параметры перемещения. И у него просто должен быть датчик – позиции, нагрузки, скорости – и блок контроля, который поддерживает необходимые условия в автоматическом режиме.
В числе самых распространенных сегодня находятся модели, сохраняющие установленный угол и/или интенсивность выполнения технологической операции.
Устройство серводвигателя
В общем случае у него следующие функциональные узлы:
- Сам привод – мотор, превращающий электрическую энергию в механическую (силу поворота); для снижения скорости до необходимой снабжен редуктором, передающим крутящий момент.
- Энкодер – датчик обратной связи, преобразующий угол поворота в управляющий сигнал, контролирующий вращение выходного вала (на последнем закреплен инструмент или какой-то другой орган выполнения действия). Для решения данной задачи также хорошо подходит потенциометр, изменяющий свое сопротивление при перемещении бегунка, причем именно пропорционально, и за счет этого обеспечивающий точное позиционирование.
- Электронная начинка, принимающая входящие параметры, считывающая и сравнивающая значения, выполняющая операции включения/выключения – это тоже то, из чего состоит сервопривод; все ЭРЕ располагаются на печатной плате, которая и помогает поддерживать обратную связь и, по сути, является важнейшей частью двигателя.
- Проводка – подключение питания (два кабеля) и доставка сигнала контроля (еще один), обеспечивающий выставление правильного положения вала, а значит и используемого инструмента.
Данная конфигурация достаточно проста, чтобы обеспечивать бесперебойное поддержание режимов и оставаться надежной. Такого узла, который стал бы «слабым звеном», попросту нет, поэтому проблемы с эксплуатацией возникают сравнительно редко. Продолжительности ресурса также способствует специфика функционирования, к особенностям которой мы переходим.
Как работает сервопривод
Принцип его действия завязан на использовании импульсного сигнала, обладающего тремя ключевыми свойствами, – частотой, наименьшей и наивысшей продолжительностью, и как раз последняя, то есть длина, и задает угол поворота. Может находиться в диапазоне 0,8-2,2 мс. Как только поступает на печатную плату, активирует энкодер (потенциометр) и, через механическую передачу, выходной вал.
Электронная схема сравнивает реальное положение вала с запрограммированным. При этом возможно 3 состояния. И первое из них – нулевой момент, то есть полного совпадения, что значит – силовой агрегат не работает (остановлен). При втором управляющий сигнал выше опорного, это провоцирует поворот в одну сторону, при третьем – ниже, что оборачивается движением вращающейся части в другом направлении.
Таким образом, принцип работы сервомотора сводится к следующему:
- привод получает импульс на вход, допустим, команду изменения угла;
- блок управления соотносит полученный сигнал с фактическими значениями, снятыми датчиком;
- исходя из результатов анализа, данная плата выдает команду – перемещения по какому-то вектору, ускорения или замедления, – причем обязательно направленную на то, чтобы привести реальную цифру к заданной и необходимой.
Сравнение осуществляется на основании разностных величин и учитывает параметр длительности, а поэтому определяет разбежку показателей с максимальной точностью. Эта особенность дает возможность обеспечить необходимое позиционирование инструмента.
Виды сервоприводов
Их классифицируют главным образом по типу используемого двигателя, выделяя:
- синхронные – отличаются быстрым набором оборотов, а также прецизионным вращением;
- асинхронные – их ключевая черта в высокой стабильности поведения вала;
- универсальные – оснащены коллекторным силовым агрегатом, либо переменного, либо постоянного тока.
Первые особенно востребованы в автомобилестроении и активно устанавливаются в АКПП – для беспроблемного переключения передач. Также они актуальны для спецтехники, транспортирующей грузы весом свыше 100 кг. Вторые и третьи больше ориентированы на различное промышленное оборудование.
Если всесторонне рассматривать серводвигатель – что это такое, принцип работы, разновидности, – то нужно уделить внимание и его основным рабочим параметрам. В списке ключевых характеристик всех его моделей:
- крутящий момент (создаваемое усилие) – обязательно прописывается в паспорте, причем сразу в двух величинах, для разного питающего напряжения;
- вариант подаваемого импульса, ведь можно управлять с помощью как цифрового, так и аналогового сигнала;
- быстродействие – определяет время, за которое вал перемещается (по часовой стрелке или против нее) на 60 градусов;
- поддерживаемый угол поворота – обычно это либо 180 0 (полуцикл), либо 360 0 (полный); хотя сегодня есть модифицированные модели, у которых вращение осуществляется непрерывно;
- материал исполнения редукторных шестеренок – это может быть пластик, карбон, латунь или композит;
- напряжение – варьируется в диапазоне от 4,8 до 7,2 В (у основной группы силовых агрегатов);
- цвета проводов и распиновка – обычно все стандартно: черный – общий, красный – питания, белый (желтый или коричневый) – контроля.
Еще немного нюансов: устройство сервомотора может предполагать наличие двигателя с сердечником. Это не лучший вариант, так как при его функционировании появляются вибрации, которые снижают точность вращения вала. Поэтому практичнее выбирать модели, у которых кинетическая энергия ротора на практике будет минимальной, даже несмотря на то, что они стоят несколько дороже. Это особенно актуально в случаях с эксплуатацией ЧПУ-станков, выполняющих сложные детали.
И несколько слов о редукторе: он может быть шестеренчатым или червячным. Первый сегодня более востребован, так как доступнее по цене и достаточно эффективно снижает частоту вращения, обеспечивая нужный крутящий момент. Второй, несмотря на лучшее передаточное число, выпускается и встречается реже, так как его производство оборачивается более серьезными затратами.
Еще один важный фактор различия видов – габаритные размеры, а именно соотношение ДхШхВ и вес. В соответствии с ними выделяют три группы силовых агрегатов:
- малые – 22 на 15 на 25 мм и до 25 г;
- стандартные (средние) – 40 на 20 на 37 мм и до 80 г;
- большие – 49 на 25 на 40 мм и до 90 г.
Следующее различие – по интерфейсу:
- аналоговые – импульсы обрабатывает микросхема;
- цифровые – сигналы считывает процессор.
Решая, для чего нужен сервопривод, помните, что нюансы – в начинке, а внешнее исполнение может быть абсолютно одинаковым.
Также разнообразие моделей можно разделить по материалу шестеренок – на такие группы:
- с пластиковыми (нейлоновыми) – легкими, стойкими к износу, но не к большим нагрузкам;
- с карбоновыми – более прочными, при этом не обладающими значительным весом, но и стоящими в несколько раз дороже предыдущих;
- с металлическими (латунными, титановыми) – тяжелыми, выдерживающими даже самый серьезный крутящий момент, но стирающимися друг о друга.
И, наконец, существуют варианты с сердечником (коллекторные) и без него. У первых есть полый ротор в несколько секций, между которыми появляется вибрация в процессе вращения. Поэтому они менее точны, чем те, чья подвижная часть полая, а также тяжелее и обеспечивают более долгий отклик, правда, и стоят дешевле.

Применение сервоприводов
Сегодня они широко используются в самых разных областях:
- в робототехнике и при создании манипуляторов; чтобы управлять ими, в свою очередь, берут аппаратно-программные средства ардуино;
- для реализации системы теплого пола – они помогают автоматически регулировать температуру, понижая или повышая ее по мере необходимости;
- в автомобилестроении – для интеграции с замками, подачи жидкости на печку, переключения скоростей в АКПП;
- в грузовом оборудовании – задают режимы захвата, подъема, транспортировки, опускания и отпускания предметов самого разного веса и габаритов.
Это далеко не все возможные сферы и ниши – данные силовые агрегаты, по сути, актуальны везде, где только требуется точно контролировать движение вала.
Особенности устройства сервопривода переменного тока
Это подвид синхронной модели, у которого ротор вращается с той же частотой, какая присуща магнитному полю, созданному обмотками статора. На последний направляется трехфазное напряжение, запускающее весь процесс функционирования.
На подвижной части закреплен энкодер, разрешающая способность которого сравнительно высокая. От него поступает один сигнал на первый вход, а от электронной платы – другой, на второй. Данная пара сравнивается, и разница между ними является показателем рассогласования, отталкиваясь от которого необходимо задать команду подачи соответствующего вольтажа для скорейшего наступления нулевого момента.
Читая о том, как работает модель, в технической литературе часто можно встретить термин «сервоусилитель»: что это такое? Это плата – блок управления, а мы уже выяснили, что она из себя представляет и для чего необходима, так что не пугайтесь нового определения.
Плюсы и минусы
Рассматриваемые силовые агрегаты обладают целым набором особенностей, и, если сравнивать их с шаговыми, можно выделить ряд достоинств.
В числе объективных преимуществ:
- точное, зачастую даже прецизионные позиционирования;
- быстрое повышение крутящего момента и понижение числа оборотов за счет использования редуктора;
- беспроблемная коррекция – внести в программу изменения можно за считаные минуты, отрегулировав перемещение рабочего инструмента по первым полученным практическим результатам;
- отличная переносимость физических, температурных и других нагрузок в течение длительного времени безостановочной эксплуатации;
- развитие значительных ускорений, обеспечивающее замечательную совместимость с быстродействующим оборудованием, например, с универсальными станками ижевского производителя – завода «Сармат»;
- поддержание равномерного крутящего момента во всем рабочем диапазоне.
Использование сервопривода не тотальное только потому, что он также обладает некоторыми недостатками.
В списке относительных минусов:
- при наличии пластиковых шестеренок или деталей из мягкого металла редуктор становится «слабым звеном», выходящим из строя под интенсивными воздействиями;
- резистивные дорожки изнашиваются в сравнительно краткие сроки (актуально для моделей с потенциометром);
- такой силовой агрегат стоит дороже шагового;
- программа, подходящая для обеспечения высокой точности, на практике часто оказывается сложной в настройке.
Ясно, что преимущества оказывают гораздо более важное влияние, и именно они обуславливают значительную степень востребованности в самых различных сферах.

Режимы управления
Работа сервопривода может осуществляться в трех разных форматах. Рассмотрим каждый из них.
Контроль положения
Здесь нужно сохранять заданный угол поворота вала, подавая последовательность сигналов. Пусть они идут с контроллера – таким образом, можно обеспечить точное позиционирование, что особенно актуально для узлов производственных станков.
Обратите внимание, с помощью совокупности импульсов не проблема задать информацию не только о положении в пространстве, но и о векторе вращения или скорости движения. Сделать это можно одним из трех способов – направляя напряжение:
- со сдвигом фазы на 90 градусов;
- сразу на два входа (SIGN, PULSE – стандартные названия);
- с перемещением по часовой стрелке или против.
Контроль скорости
Здесь сервоуправление – это увеличение или уменьшение аналогового сигнала на дискретную величину при его подаче на соответствующие обмотки. А если он еще и разнополярный, тогда не составляет труда быстро менять направление вращения.
Данный режим напоминает эксплуатацию асинхронного силового агрегата с преобразователем частоты. Потому что в ее рамках требуется постоянно выполнять разгон и замедление, задавать минимумы и максимумы и тому подобное. Главное – реализовывать не слишком сложный алгоритм, чтобы не превращать рядовую практическую задачу в непосильный труд программирования.
Контроль момента
В данном случае назначение сервопривода – обеспечивать стабильное число оборотов, вне зависимости от того, вращается двигатель или нет. Эта цель достигается путем подачи или дискретного сигнала, или аналогового двухполярного. Метод более чем актуален для оборудования, в процессе эксплуатации требующего смены давления, прижима или других параметров.
Внимание, силовой агрегат должен быть дополнительно оснащен встроенным датчиком тока, ведь именно последний и оценивает значение текущего момента, чтобы потом электроника могла сравнить его с необходимой величиной.

Процесс рекуперации
Зачастую запускается при переключении режимов работы сервомотора: что это такое? Это возвратная энергия, которая выделяется при смене знака (направления движения) относительно вращающего момента. Обычно она не слишком большая, но все равно собирается на конденсаторах, увеличивая, таким образом, напряжение на звене постоянного тока.
В тех же случаях, когда данное неравенство абсолютных значений достигнет серьезной отметки, пороговый уровень емкости шины будет пробит. И тогда все излишки будут сброшены в тормозной резистор.
Мы постарались рассмотреть все особенности данных механизмов и подчеркнуть удобство и перспективность их использования. Предлагаем также взглянуть на схемы сервоприводов, фото и видеоролики на эту тему – чтобы вы могли дополнить свое представление.