Электродвигатели – их назначение и области применения
Подписка на рассылку
Электродвигатель является специальной машиной, которая электрическую энергию преобразует в механическую. Учитывая род тока электроустановки, в которой работает электрическая машина, используются основные типы электродвигателей — постоянного и переменного тока.
Электромоторы переменного тока подразделяются на синхронные и асинхронные. Асинхронные, в свою очередь, делятся на общепромышленные, взрывозащищенные и крановые.
Электромашины переменного тока бывают однофазными и трехфазными. На современном этапе довольно широкое применение находят трехфазные синхронные и асинхронные электромоторы.

Сегодня асинхронные электромоторы являются наиболее востребованными электрическими двигателями. Такую широкую популярность асинхронные устройства получили из-за своей простоты конструкции и довольно высокой эксплуатационной надежности. Асинхронный электродвигатель довольно часто применяют в бытовой технике и на промышленных предприятиях.
В тех случаях, когда в приводах не нужны большие пусковые моменты, применяют электродвигатель с короткозамкнутым ротором. А когда не требуется плавной регулировки скорости и мощность электродвигателя большая, используется асинхронный электродвигатель с фазным ротором. Электромоторы асинхронные с фазным ротором используются в тех случаях, когда нужно снизить пусковой ток и увеличить пусковой момент.
Асинхронные однофазные агрегаты применяются в сети переменного тока 220 вольт. Такие электромоторы нашли широкое применение в бытовых стиральных машинах, бетономешалках, строительном электроинструменте, кухонных многофункциональных комбайнах, в деревообрабатывающих и сверлильных станках и другом бытовом оборудовании.
Асинхронные электрические двигатели также применяются для приводов различных крановых установок промышленного назначения, всевозможных грузовых лебедок и прочих устройств, которые применяются в производстве. Электромоторы переменного тока имеют огромное значение для многих отраслей промышленности. Асинхронные агрегаты могут быть с преобразовательным устройством в виде коллектора (коллекторные электродвигатели) или не иметь его (бесколлекторные электромоторы).
Коллекторные и бесколлекторные электродвигатели переменного тока применяются в различных промышленных и бытовых электроустройствах (холодильниках, пылесосах, мясорубках, электрическом инструменте, вентиляторах, соковыжималках) и в медицинской технике. Они рассчитаны на работу как от сети постоянного тока, так и от сети переменного тока. Для коллекторных электродвигателей характерен большой пусковой момент и относительно малые размеры.
Бесколлекторные электромоторы имеют малый уровень электромагнитных излучений и низкий уровень шума. Для них характерен высокий ресурс эксплуатации. В большинстве случаев бесколлекторные электродвигатели эксплуатируются в местах со взрывоопасной средой, например в нефтегазовой промышленности.
Довольно широкое распространение среди электромоторов переменного тока получили асинхронные электромоторы с трехфазной симметричной обмоткой на сердечнике статора, которые запитываются от сети переменного тока

Примечательно, что асинхронные электродвигатели, как правило, используются как двигатели, а синхронные электромоторы чаще всего используются как генераторы.
Синхронные электродвигатели являются двухобмоточными электрическими машинами, в которых одна из обмоток подсоединена к электрической сети с определенной постоянной частотой вращения, при этом вторая регулярно возбуждается постоянным током с частотой вращения ротора, которая не зависит от нагрузки. Такие машины применяются в качестве электродвигателей в крупных установках, таких как приводы поршневых компрессоров и воздухопроводов и, как правило, используются в качестве генераторов.
Скорость вращения синхронных моторов находится в постоянном соотношении к определенной частоте электрической сети.
Рольганговые электромоторы применяются для приводов, которые эксплуатируются в условиях высоких температур различного металлургического производства. Взрывозащищенные электромоторы предназначены для привода разных механизмов в газовой, химической, нефтеперерабатывающей промышленности, где могут появляться различные взрывоопасные соединения газов и паров с воздухом. Различные крановые электромоторы в основном предназначены для всевозможных крановых механизмов всех типов. Они могут быть применены для привода других механизмов, которые работают в кратковременных режимах эксплуатации.
Общепромышленные электромоторы широко используются в деревообрабатывающей промышленности, станкостроении, всевозможных системах промышленной вентиляции, различных транспортерах, подъемниках, всевозможном насосном оборудовании.
Синхронные машины – двигатели, генераторы и компенсаторы



Синхронная машина может работать генератором или двигателем. Синхронная машина может работать в качестве двигателя, если подвести к обмотке ее статора трехфазный ток из сети. В этом случае в результате взаимодействия магнитных полей статора и ротора поле статора увлекает за собой ротор. При этом ротор вращается в ту же сторону и с такой же скоростью, как и поле статора.

Наибольшее распространение получил генераторный режим работы синхронных машин, и почти вся электроэнергия вырабатывается синхронными генераторами. Синхронные двигатели применяются при мощности более 600 кВт и до 1 кВт как микродвигатели. Синхронные генераторы на напряжение до 1000 В применяются в агрегатах для автономных систем электроснабжения.
Агрегаты с этими генераторами могут быть стационарными и передвижными. Большинство агрегатов применяются с дизельными двигателями, но приводом их могут быть газовые турбины, электродвигатели и бензиновые двигатели.
Синхронный двигатель отличается от синхронного генератора лишь пусковой успокоительной обмоткой, которая должна обеспечивать хорошие пусковые свойства двигателя.
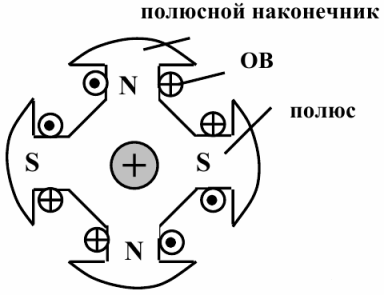
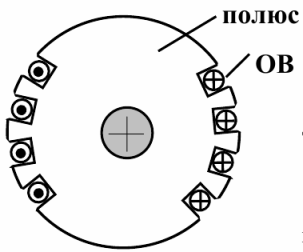
Схема шестиполюсного синхронного генератора. Показаны сечения обмоток одной фазы (три обмотки, соединенные последовательно). В показанные на рисунке свободные пазы укладываются обмотки двух других фаз. Фазы соединяются в звезду или треугольник.
Режим генератора: двигатель (турбина) вращает ротор, на обмотку которого подается постоянное напряжение ? возникает ток, который создает постоянное магнитное поле. Магнитное поле вращается вместе с ротором, пересекает статорные обмотки и наводит в них одинаковые по модулю и частоте ЭДС, но сдвинутые на 1200 (симметричная трехфазная система).
Режим двигателя: обмотку статора подключают к трёхфазной сети, а обмотку ротора к источнику постоянного тока. В результате взаимодействия вращающегося магнитного поля машины с постоянным током обмотки возбуждения, возникает вращающий момент Мвр, который приводит ротор во вращение со скоростью магнитного поля.
Механическая характеристика синхронного двигателя – зависимость n(M)– представляет собой горизонтальный отрезок прямой.
 Применение синхронных двигателей
Применение синхронных двигателей
Синхронные двигатели имеют по сравнению с асинхронными большое преимущество, заключающееся в том, что благодаря возбуждению постоянным током они могут работать с cosфи = 1 и не потребляют при этом реактивной мощности из сети, а при работе, с перевозбуждением даже отдают реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшаются падение напряжения и потери в ней, а также повышается коэффициент мощности генераторов, работающих на электростанциях.
Максимальный момент синхронного двигателя пропорционален U, а у асинхронного двигателя U 2 .
Поэтому при понижении напряжения синхронный двигатель сохраняет большую нагрузочную способность. Кроме того, использование возможности увеличения тока возбуждения синхронных двигателей позволяет увеличивать их надежность работы при аварийных понижениях напряжения в сети и улучшать в этих случаях условия работы энергосистемы в целом. Вследствие большей величины воздушного зазора добавочные потери в стали и в клетке ротора синхронных двигателей меньше, чем у асинхронных, благодаря чему к. п. д. синхронных двигателей обычно выше.
С другой стороны, конструкция синхронных двигателей сложнее, чем короткозамкнутых асинхронных двигателей, и, кроме того, синхронные двигатели должны иметь возбудитель или иное устройство для питания обмотки возбуждения постоянным током. Вследствие этого синхронные двигатели в большинстве случаев дороже асинхронных двигателей с короткозамкнутым ротором.
При эксплуатации синхронных двигателей возникли существенные трудности с их пуском. В настоящее время эти трудности преодолены.

Пуск и регулирование скорости вращения синхронных двигателей также сложнее. Тем не менее, преимущество синхронных двигателей настолько велико, что при больших мощностях их целесообразно применять всюду, где не требуется частых пусков и остановок и регулирования скорости вращения (двигатель-генераторы, мощные насосы, вентиляторы, компрессоры, мельницы, дробилки и пр.).
Синхронные компенсаторы предназначаются для компенсации коэффициента мощности сети и поддержания нормального уровня напряжения сети в районах сосредоточения потребительских нагрузок. Нормальным являемся перевозбужденный режим работы синхронного компенсатора, когда он отдает в сеть реактивную мощность.
В связи с этим компенсаторы, как и служащие для этих же целей батареи конденсаторов, устанавливаемые на потребительских подстанциях, называют также генераторами реактивной мощности. Однако в периоды спада потребительских нагрузок (например, ночью) нередко возникает необходимость работы синхронных компенсаторов также в недовозбужденном режиме, когда они потребляют из сети индуктивный ток и реактивную мощность, так как в этих случаях напряжение сети стремится возрасти и для поддержания его на нормальном уровне необходимо загрузить сеть индуктивными токами, вызывающими в ней дополнительные падения напряжения.
Для этого каждый синхронный компенсатор снабжается автоматическим регулятором возбуждения или напряжения, который регулирует величину его тока возбуждения так, что напряжение на зажимах компенсатора остается постоянным.
Электродвигатели
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является – электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор – неподвижная часть, ротор – вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя




- Подробное описание принципа работы электродвигателей разных типов:
- Принцип работы однофазного асинхронного электродвигателя
- Принцип работы трехфазного асинхронного электродвигателя
- Принцип работы синхронного электродвигателя
Классификация электродвигателей
| Вращающийся электродвигатель | ||||
|---|---|---|---|---|
| Само коммутируемый | Внешне коммутируемый | |||
| С механической коммутацией (коллекторный) | С электронной коммутацией 1 (вентильный 2, 3 ) | Асинхронный электродвигатель | Синхронный электродвигатель | |
| Переменного тока | Постоянного тока | Переменного тока 4 | Переменного тока | |
|
|
|
|
|
| Простая электроника | Выпрямители, транзисторы | Более сложная электроника | Сложная электроника (ЧП) | |
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, – датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока – электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ – коллекторный двигатель постоянного тока
- БДПТ – бесколлекторный двигатель постоянного тока
- ЭП – электрический преобразователь
- ДПР – датчик положения ротора
- ВРД – вентильный реактивный двигатель
- АДКР – асинхронный двигатель с короткозамкнутым ротором
- АДФР – асинхронный двигатель с фазным ротором
- СДОВ – синхронный двигатель с обмоткой возбуждения
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина – вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель

Коллекторный электродвигатель постоянного тока
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина – вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].

Асинхронный электродвигатель

Cинхронный электродвигатель
Специальные электродвигатели

Серводвигатель
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
 ,
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
 ,
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин -1 [4]
Начальный пусковой момент – момент электродвигателя при пуске.
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
 ,
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].
 ,
,
Для вращательного движения
 ,
,
- где
 – угол, рад,
– угол, рад,
 – угол, рад,
– угол, рад, ,
,
- где – углавая скорость, рад/с,
 – углавая скорость, рад/с,
– углавая скорость, рад/с,Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
 ,
,
- где – коэффициент полезного действия электродвигателя,
- P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (механическая), Вт
 – коэффициент полезного действия электродвигателя,
– коэффициент полезного действия электродвигателя,- При этом потери в электродвигатели обусловлены:
- электрическими потерями – в виде тепла в результате нагрева проводников с током;
- магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Частота вращения

- где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
 ,
,
- где J – момент инерции, кг∙м 2 ,
- m – масса, кг
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением
 ,
,
- где – угловое ускорение, с -2 [2]
 – угловое ускорение, с -2 [2]
– угловое ускорение, с -2 [2] ,
,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где – постоянная времени, с
 – постоянная времени, с
– постоянная времени, сМеханическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.


| Параметр |  АДКР |  СДПМП |  СДПМВ |  СРД-ПМ |  СДОВ |
|---|---|---|---|---|---|
| Постоянство мощности во всем диапазоне скоростей | |||||
| Момент к току статора | |||||
| Эффективность (КПД) во всем рабочем диапазоне |
В соответствии с выше приведенными показателями гибридный синхронный электродвигатель, а именно синхронный реактивный электродвигатель со встроенными постоянными магнитами, является наиболее подходящим для применения в качестве тягового электродвигателя в автомобилестроении (выбор проводился для концепта автомобилей BMW i3 & BMW i8). Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне [7]. Области применения электродвигателейЭлектродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии [6]. Электродвигатель. Виды и применение. Работа и устройствоЭлектродвигатель представляет электромашину, перестраивающую электрическую энергию в механическую. Обычно электрическая машина реализует механическую работу благодаря потреблению приложенной к ней электроэнергии, преобразовывающейся во вращательное движение. Ещё в технике есть линейные двигатели, способные создавать сразу поступательное движение рабочего органа. Особенности конструкции и принцип действияНе важно какое конструктивное исполнение, но устройство любых электродвигателей однотипное. Ротор и статор находятся внутри цилиндрической проточки. Вращение ротора возбуждают магнитное поле, отталкивающее его полюса от статора (неподвижной обмотки). Сохранять постоянное отталкивание можно путём перекоммутации обмоток ротора, или образовав вращающееся магнитное поле непосредственно в статоре. Первый способ присущий коллекторным электродвигателям, а второй — асинхронным трехфазным. Корпус любых электродвигателей обычно чугунный или выполнен из сплава алюминия. Однотипные двигатели, не смотря на конструкцию корпуса производятся с одинаковыми установочными размерами и электрическими параметрами. Работа электродвигателя базируется на принципах электромагнитной индукции. Магнитная и электрическая энергия создают электродвижущуюся силу в замкнутом контуре, проводящем ток. Это свойство заложено в работу любой электромашины. На движущийся электроток в середине магнитного поля постоянно воздействует механическая сила, стремительно пытающаяся отклонить направление зарядов в перпендикулярной силовым магнитным линиям плоскости. Во время прохождения электротока по металлическому проводнику либо катушке, механическая сила норовит подвинуть или развернуть всю обмотку и каждый проводник тока. Назначение и применение электродвигателейЭлектрические машины имеют много функций, они способны усиливать мощность электрических сигналов, преобразовывать величины напряжения либо переменный ток в постоянный и др. Для выполнения таких разных действий существуют многообразные типы электромашин. Двигатель представлят тип электрических машин, рассчитанных для преобразования энергии. А именно, этот вид устройств превращает электроэнергию в двигательную силу или механическую работу. Он пользуется большим спросом во многих отраслях. Их широко используется в промышленности, на станках различного предназначения и в других установках. В машиностроении, к примеру, землеройных, грузоподъёмных машинах. Также они распространены в сферах народного хозяйства и бытовых приборах. Классификация электродвигателейЭлектродвигатель, является разновидностью электромашин по:
В гистерезисных устройствах вращающий момент образуется путём перемагничивания ротора или гистерезиса (насыщения). Эти двигатели мало эксплуатируются в промышленности и не считаются традиционными. Востребованными являются магнитоэлектрические двигатели. Существует много модификаций этих двигателей. Их разделяют на большие группы по типу протекающего тока:
Особенности магнитоэлектрических двигателей постоянного токаС помощью двигателей постоянного тока создают регулируемые электрические приводы с высокими эксплуатационными и динамическими показателями. Типы электродвигателей:
Группа электродвигателей, питание которых выполняется постоянным током, подразделяется на подвиды:
Эти машины выпускаются различных размеров от самых маленьких низковольтных до громадных размеров (в основном до мегаватта). Миниатюрными электродвигателями оснащены компьютеры, телефоны, игрушки, аккумуляторные электроинструменты и т.п. Применение, плюсы и минусы электродвигателей постоянного токаЭлектромашины постоянного тока применяют в разных областях. Ими комплектуют подъёмно-транспортные, красочно-отделочные производственные машины, а также полимерное, бумажное производственное оборудование и т.д. Часто электрический двигатель этого типа встраивают в буровые установки, вспомогательные агрегаты экскаваторов и другие виды электротранспорта. Преимущества электрических двигателей:
Минусы двигателей:
Электродвигатель переменного токаВ электродвигателях переменного тока электроток описывается по синусоидальному гармоническому закону, периодично меняющему свой знак (направление). Статор этих устройств изготавливают из ферромагнитных пластинок, имеющих пазы для помещения в них витков обмотки с конфигурацией катушки. Электродвигатели по принципу работы бывают синхронными и асинхронными . Главным их отличием является то, что скорость магнитодвижущей силы статора в синхронных приборах равна скорости вращения ротора, а в асинхронных двигателях эти скорости не совпадают, обычно ротор вращается медленнее поля. Синхронный электродвигательИз-за одинакового (синхронного) вращения ротора с магнитным полем, аппараты именуют синхронными электродвигателями. Их подразделяют на подвиды:
Большая часть компьютерной техники оснащена шаговыми электродвигателями. Преобразование энергии в этих устройствах основано на дискретно угловом передвижении ротора. Шаговый электродвигатель имеет высокую продуктивность, независящую от их мизерных размеров. Достоинства синхронных двигателей:
Недостатки в синхронных устройствах:
Недостатки синхронного двигателя, делают более выгодным для использования электродвигатель асинхронного типа. Тем не менее, большинство синхронных двигателей из-за их работы с постоянной скоростью востребованы для установок в компрессоры, генераторы, насосы, а также крупные вентиляторы и пр. оборудование. Асинхронный электродвигательСтатор асинхронных двигателей представляет распределённую двухфазную, трехфазную, реже многофазную обмотку. Ротор выполняют в виде цилиндра, используя медь, алюминий либо металл. В его пазы залиты либо запрессованные токопроводящие жилы к оси вращения под определённым углом. Они соединяются в одно целое на торцах ротора. Противоток возбуждается в роторе от переменного магнитного поля статора. По конструктивным особенностям выделяют два вида асинхронных двигателей:
В остальном конструкция приборов не имеет отличий, статор у них абсолютно одинаковый. По числу обмоток выделяют такие электродвигатели:
Асинхронные электрические двигатели значительно облегчают работу людей, поэтому они незаменимы во многих сферах. Достоинствами этих приборов, которые сыграли роль в их популярности, являются следующие моменты:
Ко всему этому, можно добавить относительную стоимость асинхронных приборов. Но они также имеют и недостатки:
Но благодаря питанию электродвигателя с помощью частотного преобразователя, некоторые недостатки устройств устраняются. Поэтому потребность асинхронных моторов не падает. Их применяют в приводах разных станков в областях металлообработки, деревообработки и пр. В них нуждаются ткацкие, швейные, землеройные, грузоподъёмные и другие виды машин, а также вентиляторы, насосы, центрифуги, разные электроинструменты и бытовые приборы. Классификация электродвигателей: типы агрегатов, назначение асинхронного и синхронного оборудования
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты. Все двигатели, грубо говоря можно поделить на два вида: Двигатели постоянного токаПо неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.
Данные двигатели с наличием щёточно-коллекторного узла бывают: Колекторные – электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные – замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного токаПо типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора). Синхронный – двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Асинхронный – двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин – индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором По количеству фаз двигатели бывают: Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве: Однофазный асинхронный двигатель с короткозамкнутым роторомОднофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Двухфазный асинхронный двигатель с короткозамкнутым роторомДвухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.
Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым роторомТрехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.
Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным роторомТрехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.
Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором. Принцип действия синхронного двигателяПрежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке. Устройство синхронного двигателяСинхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением. Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора. Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря. В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора. Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться. Как работает синхронный двигательПринцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию. При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток. Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения. Схема запуска двигателя и его регулировкаУ синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной. Сам запуск агрегата может производиться разными способами:
Различия синхронных и асинхронных двигателейВсе электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора. Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону. Преимущества и недостатки ночного тарифа на электроэнергию Один из способов экономии — использование ночного Сервоприводы. Виды и устройство. Характеристики и применение Сервоприводы и механизмы оснащены датчиком, который отслеживает Пирометры. Виды и устройство. Измерения и применение Пирометры это приборы для определения температуры объекта Что такое микроволны? Свойства сверхвысокочастотных волн В современной жизни сверхвысокочастотные волны используются весьма активно. Преимущества и недостатки энергосберегающих ламп Зарипов Максим Вадимович, Терегулов Тагир Рафаэлевич. E-mail: warcrft100@yandex.ru Нашу Глухозаземленная нейтраль: принцип работы, устройство, особенности В подавляющем большинстве электросетей (до 1 кВ) применяется |