Электродвигатели
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является – электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор – неподвижная часть, ротор – вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя




- Подробное описание принципа работы электродвигателей разных типов:
- Принцип работы однофазного асинхронного электродвигателя
- Принцип работы трехфазного асинхронного электродвигателя
- Принцип работы синхронного электродвигателя
Классификация электродвигателей
| Вращающийся электродвигатель | ||||
|---|---|---|---|---|
| Само коммутируемый | Внешне коммутируемый | |||
| С механической коммутацией (коллекторный) | С электронной коммутацией 1 (вентильный 2, 3 ) | Асинхронный электродвигатель | Синхронный электродвигатель | |
| Переменного тока | Постоянного тока | Переменного тока 4 | Переменного тока | |
|
|
|
|
|
| Простая электроника | Выпрямители, транзисторы | Более сложная электроника | Сложная электроника (ЧП) | |
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, – датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока – электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ – коллекторный двигатель постоянного тока
- БДПТ – бесколлекторный двигатель постоянного тока
- ЭП – электрический преобразователь
- ДПР – датчик положения ротора
- ВРД – вентильный реактивный двигатель
- АДКР – асинхронный двигатель с короткозамкнутым ротором
- АДФР – асинхронный двигатель с фазным ротором
- СДОВ – синхронный двигатель с обмоткой возбуждения
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина – вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель

Коллекторный электродвигатель постоянного тока
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина – вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].

Асинхронный электродвигатель

Cинхронный электродвигатель
Специальные электродвигатели

Серводвигатель
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
 ,
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
 ,
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин -1 [4]
Начальный пусковой момент – момент электродвигателя при пуске.
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
 ,
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].
 ,
,
Для вращательного движения
 ,
,
- где
 – угол, рад,
– угол, рад,
 – угол, рад,
– угол, рад, ,
,
- где – углавая скорость, рад/с,
 – углавая скорость, рад/с,
– углавая скорость, рад/с,Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
 ,
,
- где – коэффициент полезного действия электродвигателя,
- P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (механическая), Вт
 – коэффициент полезного действия электродвигателя,
– коэффициент полезного действия электродвигателя,- При этом потери в электродвигатели обусловлены:
- электрическими потерями – в виде тепла в результате нагрева проводников с током;
- магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Частота вращения

- где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
 ,
,
- где J – момент инерции, кг∙м 2 ,
- m – масса, кг
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением
 ,
,
- где – угловое ускорение, с -2 [2]
 – угловое ускорение, с -2 [2]
– угловое ускорение, с -2 [2] ,
,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где – постоянная времени, с
 – постоянная времени, с
– постоянная времени, сМеханическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.


| Параметр |  АДКР |  СДПМП |  СДПМВ |  СРД-ПМ |  СДОВ |
|---|---|---|---|---|---|
| Постоянство мощности во всем диапазоне скоростей | |||||
| Момент к току статора | |||||
| Эффективность (КПД) во всем рабочем диапазоне |
В соответствии с выше приведенными показателями гибридный синхронный электродвигатель, а именно синхронный реактивный электродвигатель со встроенными постоянными магнитами, является наиболее подходящим для применения в качестве тягового электродвигателя в автомобилестроении (выбор проводился для концепта автомобилей BMW i3 & BMW i8). Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне [7]. Области применения электродвигателейЭлектродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии [6]. КПД электродвигателейПодписка на рассылкуЭлектрическими двигателями переменного или постоянного тока комплектуются приводы станков, насосов и вентиляторов, а также других механизмов, используемых на предприятиях тяжелой и легкой промышленности. Рентабельность производства напрямую зависит от себестоимости продукции, на которую в большой степени влияет эффективность эксплуатации оборудования, поэтому КПД и мощность электродвигателя являются основными параметрами, на основании которых выполняется подбор привода. Определение КПД электродвигателяПринцип работы любой электрической машины основан на преобразовании энергии тока, протекающего по обмоткам статора и создающего магнитное поле, во вращение ротора. Коэффициент полезного действия (КПД) электродвигателя определяется соотношением вырабатываемой им механической мощности на валу (p2) к полной мощности, потребляемой из сети (p1) и выражается в процентах:
Факторы, влияющие на величину КПДКоэффициент полезного действия никогда не может быть равным единице, так как существуют неизбежные потери, снижающие полезную мощность. Они делятся на три группы: Электрические потери зависят от степени нагрузки двигателя и являются следствием нагрева обмоток статора, вызванного работой тока по преодолению электрического сопротивления проводников, из которых они выполнены. Поэтому максимальный КПД электродвигателя достигается, когда нагрузка на двигатель составляет 75% от максимальной расчетной величины. Магнитные потери происходят из-за неизбежного перемагничивания активного железа статора и ротора, а также возникновения в нем вихревых токов. Третья группа обусловлена наличием трения в подшипниках, на которых вращается вал, а также сопротивлением, оказываемым воздухом крыльчатке вентилятора и самому ротору (якорю). Из-за наличия щеточно-коллекторного узла КПД электродвигателя постоянного тока несколько ниже коэффициента полезного действия машин с короткозамкнутым ротором. Это также относится к асинхронным электродвигателям с фазным ротором из-за дополнительного трения щеток об контактные кольца. Способы повысить КПД двигателяСледует помнить, что реальный коэффициент полезного действия может несколько отличатся от паспортных величин, указанных на шильдике двигателя. Чтобы выполнить расчет КПД электродвигателя в реальных условиях эксплуатации, необходимо учитывать неравномерность распределения питающего напряжения в фазах. В зависимости от величины асимметрии падение полезной мощности может достигать 5-7%. Увеличение КПД электрической машины возможно только за счет снижения потерь и контроля качества силовой сети. Механические потери можно уменьшить благодаря более качественным подшипникам, установки крыльчатки вентилятора, выполненной из современных материалов для уменьшения сопротивлению воздуху. Нагрев обмоток можно уменьшить благодаря использованию обмоточных проводов, выполненных из очищенной меди, имеющих меньшее сопротивление. Снизить потери на перемагничивание активного железа и минимизировать влияние вихревых токов можно используя для набора сердечника необходимо использовать качественную электромагнитную сталь с надежной изоляцией. Кроме того, ведутся работы по разработке наилучшей геометрии зубцов статора, благодаря которым будет увеличена концентрация магнитного поля. В реальности КПД асинхронного электродвигателя можно несколько увеличить за счет использования частотного преобразователя, позволяющего оптимизировать расход электроэнергии. Следует помнить, что эффективность эксплуатации двигателя с КПД 98% сильно упадет, если его использовать для приведения в движения механизма, имеющего более низкий коэффициент полезного действия. Формула КПД электродвигателяКаждая система или устройство обладает определенным коэффициентом полезного действия (КПД). Данный показатель характеризует эффективность их работы по отдаче или преобразованию какого-либо вида энергии. По своему значению КПД является безмерной величиной, представляемой в виде числового значения в пределах от 0 до 1, или в процентном отношении. Эта характеристика в полной мере касается и всех типов электрических двигателей. Характеристики КПД в электродвигателяхЭлектрические двигатели относятся к категории устройств, выполняющих преобразование электрической энергии в механическую. Коэффициент полезного действия для данных устройств определяет их эффективность в деле выполнения основной функции. Как найти кпд двигателя? Формула КПД электродвигателя выглядит так: ƞ = Р2/Р1. В этой формуле Р1 является подведенной электрической мощностью, а Р2 – полезной механической мощностью, вырабатываемой двигателем. Значение электрической мощности (Р) определяется формулой Р = UI, а механической – Р = А/t, как отношение работы к единице времени. Превращение электрической энергии в механическую сопровождается постепенной потерей мощности. Потеря КПД чаще всего связана с выделением тепла, когда происходит нагрев электродвигателя в процессе работы. Причины потерь могут быть магнитными, электрическими и механическими, возникающими под действием силы трения. Поэтому в качестве примера лучше всего подходит ситуация, когда электрической энергии было потреблено на 1000 рублей, а полезной работы произведено всего лишь на 700-800 рублей. Таким образом, коэффициент полезного действия в данном случае составит 70-80%, а вся разница превращается в тепловую энергию, которая и нагревает двигатель.
Для охлаждения электродвигателей используются вентиляторы, прогоняющие воздух через специальные зазоры. В соответствии с установленными нормами, двигатели А-класса могут нагреваться до 85-90 С, В-класса – до 110 С. Если температура двигателя превышает установленные нормы, это свидетельствует о возможном скором межвитковом замыкании статора. В зависимости от нагрузки КПД электродвигателя может изменять свое значение:
Одной из причин снижения КПД электродвигателя может стать асимметрия токов, когда на каждой из трех фаз появляется разное напряжение. Например, если в 1-й фазе имеется 410 В, во 2-й – 402 В, в 3-й – 288 В, то среднее значение напряжения составит (410+402+388)/3 = 400 В. Асимметрия напряжения будет иметь значение: 410 – 388 = 22 вольта. Таким образом, потери КПД по этой причине составят 22/400 х 100 = 5%. Падение КПД и общие потери в электродвигателеСуществует множество негативных факторов, под влиянием которых складывается количество общих потерь в электрических двигателях. Существуют специальные методики, позволяющие заранее их определить. Например, можно определить наличие зазора, через который мощность частично подается из сети к статору, и далее – на ротор. Потери мощности, возникающие в самом стартере, состоят из нескольких слагаемых. В первую очередь, это потери, связанные с вихревыми токами и частичным перемагничиванием сердечника статора. Стальные элементы оказывают незначительное влияние и практически не принимаются в расчет. Это связано со скоростью вращения статора, которая значительно превышает скорость магнитного потока. В этом случае ротор должен вращаться в строгом соответствии с заявленными техническими характеристиками. Значение механической мощности вала ротора ниже, чем электромагнитная мощность. Разница составляет количество потерь, возникающих в обмотке. К механическим потерям относятся трения в подшипниках и щетках, а также действие воздушной преграды на вращающиеся части. Работа электрического двигателя и КПД электромотораСогласно закону природы, энергия не исчезает и ниоткуда не берётся, она просто передаётся от одного вещества к другому, изменяя форму. На этом явлении и построена работа электрического двигателя. Его КПД, в зависимости от вида устройства, может изменяться от 75 до 96 процентов. При этом величина полезной работы зависит не только от конструкции электродвигателя, но также и от его характеристик, например, мощности. Общие сведенияДля того чтобы механизм привести в действие, нужно затратить работу. Если при этом нет трения деталей, то он считается идеальным. В этом случае его полезная работа, выполненная самим двигателем, будет равняется затраченной. Под последней же понимают ту, что совершается для приведения механизма в действие при приложении внешней силы. О такой работе говорят, что она полная. В реальных же устройствах детали не являются невесомыми, они имеют вес из-за чего существует трение. Поэтому полезная работа (Ап) будет меньше затраченной (Аз). При этом если одну увеличить в несколько раз, то вторая возрастёт на то же значение. Другими словами, отношение Ап / Аз является постоянной величиной для конкретно рассматриваемого устройства. Но так как механизм неидеальный, то это отношение всегда будет меньше единицы. Значение выражения Ап / Аз, по сути, описывает качество устройства, являясь важной для него характеристикой. Поэтому ему присвоили отдельное имя — коэффициент полезного действия (КПД). Для его обозначения решили использовать букву греческого алфавита «эта» (η). Часто формулу записывают так: η = (Ап / Аз) * 100%, считая его в процентах. Для электродвигателя коэффициент находят как отношение работы, выполненной самим устройством к действию по его запуску. КПД электрического прибора, впрочем, как и любого другого, всегда будет меньше единицы. Если представить, что это не так, то в этом случае получался бы источник новой энергии. А согласно законам природы, она не может взяться ниоткуда. То есть такого устройства не существует. Ещё в XIX веке французская академия наук отказалась принимать проекты так называемых вечных двигателей из-за противоречия фундаментальному явлению природы — закону сохранения энергии.
Изобретателем устройства считается физик-экспериментатор из Англии Майкл Фарадей. Именно он придумал способ, как заставить намагниченную стрелку оборачиваться вокруг магнита. Это послужило основой для открытия Ампером соленоида и Барлоу электрического колеса, ставшего родоначальником униполярного электродвигателя. Принцип работы Пусть есть рамка, которая помещена в магнитное поле. Её можно подключить к источнику тока. При этом принять, что перемещаются носители зарядов против часовой стрелки. Для этого положительный полюс генератора нужно подключить справа, а отрицательный слева. Эта рамка может поворачиваться вокруг горизонтальной оси. Помещена она в магнитное поле линии которого направлены перпендикулярно оси вращения. Магнетизм будет влиять на каждую сторону рамки по-разному. Чтобы определить, как будут действовать силы нужно воспользоваться правилом буравчика: если ладонь расположить таким образом, чтобы в неё входили линии магнитного потока, а пальцы совпадали с направлением тока, то отогнутый большой палец укажет направление воздействия. Таким образом, получается:
В результате рамка с током начинает поворачиваться. Но как только она изменит своё положение на 90 градусов, то сразу же замрёт. Действующие силы изменят своё положение. Это приведёт к тому, что они будут растягивать рамку. Получается, что в магнитном поле проводник стремится повернуться так, чтобы её плоскость стала перпендикулярно направлению действия поля. Этот эффект и используется в работе электродвигателя. Изменяя направление тока, можно добиться постоянного вращения рамки. Делается это с помощью цилиндра, разрезанного на две части. Один провод рамки подключается изнутри к правому полукольцу, а другой к левому. С внешних же сторон с помощью скользящих контактов подаётся напряжение от источника тока. При такой схеме в тот момент, когда рамка повернётся на 90 градусов, разрезы цилиндра изменят своё положение. Разогнавшись, конструкция проскочит это положение по инерции, то есть выполнит половину оборота. На её стороны опять будут действовать две противоположно направленные силы Ампера. Рамка снова начнёт разворачиваться, стремясь вращаться по часовой стрелке. Это явление будет происходить в такой системе непрерывно.
Устройство электромотораКПД двигателя внутреннего сгорания располагается в пределах от 40 до 60%. В то время как у электрического он достигает 96%. Это довольно высокий показатель которого добиваются с помощью усовершенствования конструкции и использования сверхпроводниковых материалов. Существует несколько типов двигателей, работающих от электричества. Но в их конструкции используются одинаковые основные части. Так, в состав устройства электрического двигателя входит:
Неподвижная часть двигателя называется стартером, а вращающаяся — ротором. В пазы сердечника укладывают согнутые в форме рамки провода. Их концы соединяют с коллектором. К его пластинам поджимают через пружины две положительные щётки, подключённые через обмотки возбуждения и две отрицательные, соединённые с массой стартера. В задней крышке последнего устанавливаются щёткодержатели и втулка якоря. От плюсовой клеммы источника питания провод идёт на входной контакт стартера. Ток проходит по нему, поступает на обмотку возбуждения и попадает на положительную щётку. С коллектора заряды переходят на рамки якоря, а после — на отрицательную щётку и на минус источника тока. В результате взаимодействия магнитного поля с обмотками возбуждения и рамками с током якорь начинает вращаться. Это классическое устройство электродвигателя. Но техника не стоит на месте.
Способы повышения КПДНахождение путей решения задачи по повышению энергоэффективности электродвигателей в промышленности и быту сегодня актуально как никогда. Например, новое поколение автомобилей — электромобили, становятся популярными из-за их экологичности по сравнению с дизельными моторами. Так, для сравнения, КПД машины с двигателем «Тесла», согласно презентации General Motors, составляет 95%, а с классическим топливным — 36%. Основными причинами потерь в любом электродвигателе являются:
Для электродвигателей с короткозамкнутым ротором мощностью до 17 кВт КПД, как правило, не превышает 88 процентов. Основные потери энергии происходят из-за нагревания. Охлаждение электрического мотора позволяет поднять наибольшее значение на 3%. При этом как показывает практика наилучший КПД может быть получен при работе двигателя на ¾ нагрузки. Так, для сравнения, в режиме холостого хода η = 0%, а при полной — η = 87%. Получается, что суммарность потерь зависит от мощности и величины нагрузки. В начале 2000 годов популярным способом повышения КПД стало введение контроля коэффициента мощности (ККМ). С его помощью выполняется поддержание оптимального угла между вращающимися магнитными полями в электрическом двигателе. Достигается это пространственно-векторным управлением. По определению оптимальный угол между полями ротора и статора должен быть равен 90 0 С. Поэтому для поддержания его при различных режимах работы используют следующую последовательность включения: выпрямитель с активной ККМ, инвертор управления, трёхфазный двигатель. Эффективность такой схемы приближает работу электродвигателя к 96%. По прогнозам инженеров, это не предел. Использование энергоэффективных блоков ККМ на микроконтроллерах нового поколения и усовершенствования алгоритмов позволит повысить КПД электродвигателя ещё на два процента. Устройство и принцип работы электродвигателя
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы. В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской. Как работает электродвигательДвигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение. Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается. В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения. В быту же постоянные магниты используются в детских игрушках на батарейках. В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор. Виды электродвигателейСегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
По принципу работы:
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре . Принцип работы и устройство асинхронного электродвигателя В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя. Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым. Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал. Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее. Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром. Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты. Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех. Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала. Принцип работы и устройство синхронного электродвигателя переменного тока Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных). Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д. В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару. Наиболее частыми поломками коллекторных двигателей является:
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону. Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление. Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье. Vladimirus-teamРасчет КПД электродвигателя электродвигателя онлайн
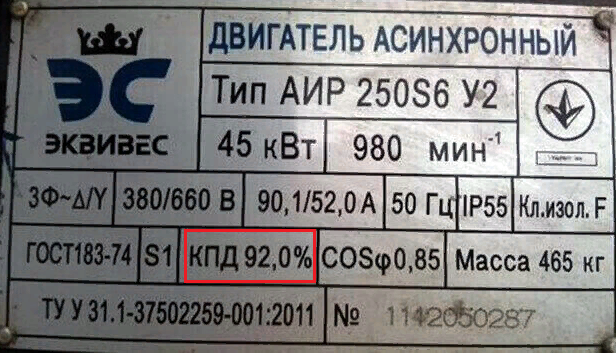
Расчет КПД электродвигателя электродвигателя онлайнНоминальные данные электродвигателя указываются на заводском щитке или в другой технической документации.
Поделиться в соц сетях:
КомментарииОтправить комментарийПопулярные сообщения из этого блогаКалькулятор индекса формы тела – ABSI – индекс формы телаABSI – индекс формы тела – калькулятор индекса формы тела. Оценка нормальности тела при помощь ИФТ – Индекс формы тела. ABSI ( A Body Shape Index) — является метрикой для оценки последствий для здоровья лишней массы тела. Включение в расчёт окружности талии делает BSI лучшим показателем риска для здоровья от избыточного веса, чем стандартный индекс массы тела. ABSI является строгим статистическим индикатором риска преждевременной смерти – каждый шаг повышения индекса ассоциирован с 13% – ым ростом показателя. Среди участников исследований, чей ABSI находился в верхних 20-процентных пределах значений, риск преждевременной смерти оказался на 61% выше, чем у тех, чей индекс был в нижних 20-процентных пределах. A Body Shape Index (Индекс формы тела): Body mass index (BMI) (Индекс массы тела): Чем ниже значение ABSI, тем меньше риск для здоровья. Приведенные ниже данны… Формула Миффлина-Сан Жеора для расчета калорийФормула основного обмена Миффлина-Сан Жеора (mifflin st jeor) Формула основного обмена Миффлина-Сан Жеора выведена в 2005 году и по утверждению Американской Диетической Ассоциации (АДА) на сегодняшний день позволяет наиболее точно рассчитать сколько калорий тратит организм здорового взрослого человека в состоянии покоя. Расчет базового обмена веществ: Формула Миффлина-Сан Жеора для женщины: ВОО =10 * вес(кг) + 6.25 * рост (см) – 4.92 * возраст – 161; Формула Миффлина-Сан Жеора для мужчины: ВОО = 10 * вес (кг) + 6.25 * рост (см) – 4.92 * возраст + 5; Для этого умножаем полученное число на коэффициент физической активности. Коэффициенты физической активности (К) Индекс Эрисмана – индекс пропорциональности грудной клетки.Индекс Эрисмана – определяет пропорциональность развития грудной клетки По формуле: Низкие или отрицательные значения свидетельствуют об узкогрудии. Индекс Эрисмана рассчитать онлайн Пол: Пирометры. Виды и устройство. Измерения и применение Пирометры это приборы для определения температуры объекта Что такое микроволны? Свойства сверхвысокочастотных волн В современной жизни сверхвысокочастотные волны используются весьма активно. Глухозаземленная нейтраль: принцип работы, устройство, особенности В подавляющем большинстве электросетей (до 1 кВ) применяется Преимущества и недостатки энергосберегающих ламп Зарипов Максим Вадимович, Терегулов Тагир Рафаэлевич. E-mail: warcrft100@yandex.ru Нашу Проверка емкости конденсатора тестерами Чтобы убедиться в исправности конденсаторов, необходимо провести определение их исправности Трёхклавишный выключатель света: схема подключения с розеткой и без неё В панельных домах широко |
 Исходя из формулы, следует, что чем ближе этот параметр к единице, тем выше будет эффективность использования оборудования.
Исходя из формулы, следует, что чем ближе этот параметр к единице, тем выше будет эффективность использования оборудования.