Схемы любительских частотных преобразователей
 Одна из первых схем преобразователя для питания трехфазного двигателя была опубликована в журнале «Радио» №11 1999г. Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке.
Одна из первых схем преобразователя для питания трехфазного двигателя была опубликована в журнале «Радио» №11 1999г. Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке.
Преобразователь предназначался для питания миниатюрного трехфазного двигателя ДИД-5ТА, который использовался в станке для сверления печатных плат. При этом следует отметить, что рабочая частота этого двигателя 400Гц, а напряжение питания 27В. Кроме того, средняя точка двигателя (при соединении обмоток «звездой») выведена наружу, что позволило предельно упростить схему: понадобилось всего три выходных сигнала, а на каждую фазу потребовался всего один выходной ключ. Схема генератора показана на рисунке 1.
Как видно из схемы преобразователь состоит из трех частей: генератора-формирователя импульсов трехфазной последовательности на микросхемах DD1…DD3, трех ключей на составных транзисторах (VT1…VT6) и собственно электродвигателя M1.
На рисунке 2 показаны временные диаграммы импульсов, сформированных генератором-формирователем. Задающий генератор выполнен на микросхеме DD1. С помощью резистора R2 можно установить требуемую частоту вращения двигателя, а также изменять ее в некоторых пределах. Более подробную информацию о схеме можно узнать в указанном выше журнале. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами.
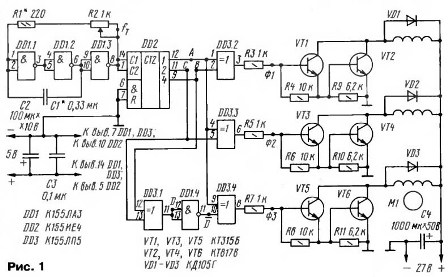
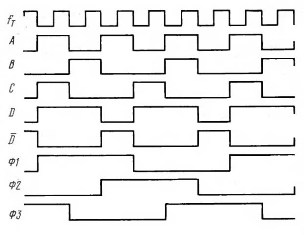
Рисунок 2. Временные диаграммы импульсов генератора.
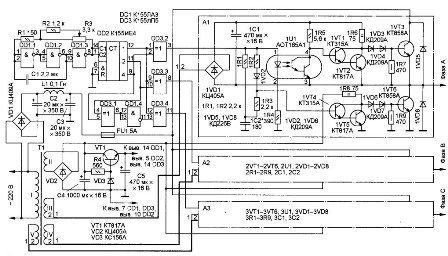
На базе рассмотренного контроллера А. Дубровским из г. Новополоцка Витебской обл. была разработана конструкция частотно-регулируемого привода для двигателя с питанием от сети переменного тока напряжением 220В. Схема устройства была опубликована в журнале «Радио» 2001г. №4.
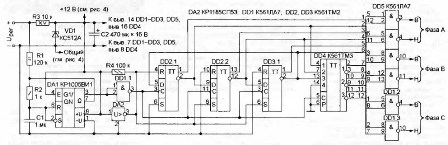
В этой схеме, практически без изменений, используется только что рассмотренный контроллер по схеме М. Мухина. Выходные сигналы с элементов DD3.2, DD3.3 и DD3.4 используются для управления выходными ключами A1, A2, и A3, к которым подключается электродвигатель. На схеме полностью показан ключ A1, остальные идентичны. Полностью схема устройства показана на рисунке 3.
Подключение двигателя к выходу трехфазного инвертора
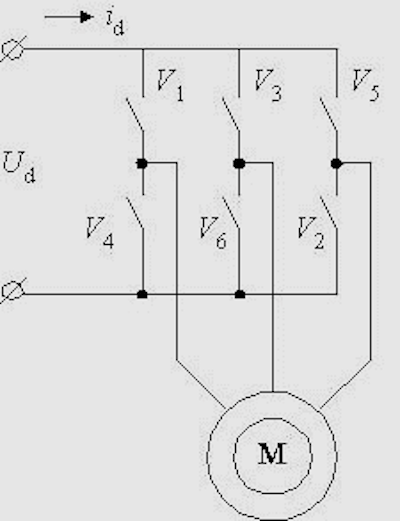
Для ознакомления с подключением двигателя к выходным ключам стоит рассмотреть упрощенную схему, приведенную на рисунке 4.
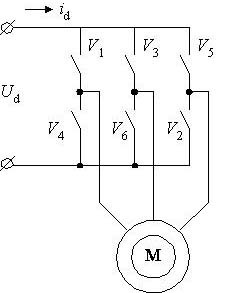
На рисунке показан электродвигатель M, управляемый ключами V1…V6. Полупроводниковые элементы для упрощения схемы показаны в виде механических контактов. Питание электродвигателя осуществляется постоянным напряжением Ud получаемым от выпрямителя (на рисунке не показан). При этом, ключи V1, V3, V5 называются верхними, а ключи V2, V4, V6 нижними.
Совершенно очевидно, что открытие одновременно верхних и нижних ключей, а именно парами V1&V6, V3&V6, V5&V2 совершенно недопустимо: произойдет короткое замыкание. Поэтому, для нормальной работы такой ключевой схемы, обязательно, чтобы к моменту открытия нижнего ключа верхний ключ уже был закрыт. С этой целью контроллеры управления формируют паузу, часто называемую «мертвой зоной».
Величина этой паузы такова, чтобы обеспечить гарантированное закрытие силовых транзисторов. Если эта пауза будет недостаточна, то возможно кратковременное открытие верхнего и нижнего ключа одновременно. Это вызывает нагрев выходных транзисторов, часто приводящий к выходу их из строя. Такую ситуацию называют сквозными токами.
Вернемся к схеме, показанной на рисунке 3. В данном случае верхними ключами являются транзисторы 1VT3, а нижними 1VT6. Нетрудно заметить, что нижние ключи гальванически связаны с управляющим устройством и межу собой. Поэтому управляющий сигнал с выхода 3 элемента DD3.2 через резисторы 1R1 и 1R3 подаются непосредственно на базу составного транзистора 1VT4…1VT5. Этот составной транзистор есть не что иное, как драйвер нижнего ключа. В точности также от элементов DD3, DD4 управляются составные транзисторы драйверов нижнего ключа каналов A2 и A3. Питание всех трех каналов осуществляется от одного и того же выпрямителя на диодном мосте VD2.
Верхние же ключи гальванической связи с общим проводом и управляющим устройством не имеют, поэтому для управления ими кроме драйвера на составном транзисторе 1VT1…1VT2 пришлось в каждый канал установить дополнительный оптрон 1U1. Выходной транзистор оптрона в этой схеме также выполняет функцию дополнительного инвертора: когда на выходе 3 элемента DD3.2 высокий уровень открыт транзистор верхнего ключа 1VT3.
Для питания каждого драйвера верхнего ключа используется отдельный выпрямитель 1VD1, 1C1. Каждый выпрямитель питается от индивидуальной обмотки трансформатора, что можно рассматривать как недостаток схемы.
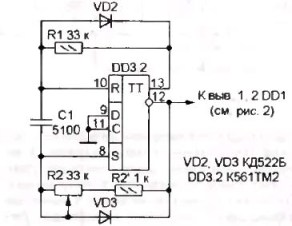
Конденсатор 1C2 обеспечивает задержку переключения ключей около 100 микросекунд, столько же дает оптрон 1U1, тем самым формируется вышеупомянутая «мертвая зона».
Достаточно ли только регулирования частоты?
С понижением частоты питающего переменного напряжения падает индуктивное сопротивление обмоток двигателя (достаточно вспомнить формулу индуктивного сопротивления), что приводит к увеличению тока через обмотки, и, как следствие, к перегреву обмоток. Также происходит насыщение магнитопровода статора. Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя.
Одним из способов решения проблемы в любительских частотниках предлагалось это самое эффективное значение регулировать при помощи ЛАТРа, подвижный контакт которого имел механическую связь с переменным резистором регулятора частоты. Такой способ был рекомендован в статье С. Калугина «Доработка регулятора частоты вращения трехфазных асинхронных двигателей». Журнал «Радио» 2002, №3, стр.31.
В любительских условиях механический узел получался в изготовлении сложным, а главное ненадежным. Более простой и надежный способ использования автотрансформатора был предложен Э. Мурадханяном из Еревана в журнале «Радио» №12 2004. Схема этого устройства показана на рисунках 5 и 6.
Напряжение сети 220В подается на автотрансформатор T1, а с его подвижного контакта на выпрямительный мост VD1 с фильтром C1, L1, C2. На выходе фильтра получается изменяемое постоянное напряжение Uрег, используемое собственно для питания двигателя.
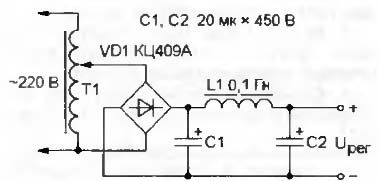
Напряжение Uрег через резистор R1 также подается на задающий генератор DA1, выполненный на микросхеме КР1006ВИ1 (импортный вариант NE555). В результате такого подключения обычный генератор прямоугольных импульсов превращается в ГУН (генератор, управляемый напряжением). Поэтому, при увеличении напряжения Uрег увеличивается и частота генератора DA1, что приводит к увеличению частоты вращения двигателя. При снижении напряжения Uрег пропорционально уменьшается и частота задающего генератора, что позволяет избежать перегрев обмоток и перенасыщение магнитопровода статора.
В той же журнальной статье автор предлагает вариант задающего генератора, который позволяет избавиться от использования автотрансформатора. Схема генератора показана на рисунке 7.
Генератор выполнен на втором триггере микросхемы DD3, на схеме обозначен как DD3.2. Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Вместе с регулировкой частоты изменяется и длительность импульса на выходе генератора: при понижении частоты длительность уменьшается, поэтому напряжение на обмотках двигателя падает. Такой принцип управления называется широтно импульсной модуляцией (ШИМ).
В рассматриваемой любительской схеме мощность двигателя невелика, питание двигателя производится прямоугольными импульсами, поэтому ШИМ достаточно примитивна. В реальных промышленных частотных преобразователях большой мощности ШИМ предназначена для формирования на выходе напряжений практически синусоидальной формы, как показано на рисунке 8, и для реализации работы с различными нагрузками: при постоянном моменте, при постоянной мощности и при вентиляторной нагрузке.
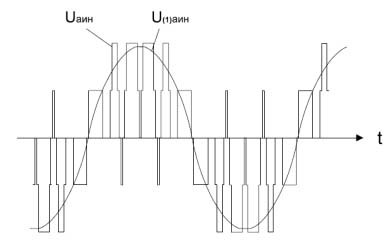
Рисунок 8. Форма выходного напряжения одной фазы трехфазного инвертора с ШИМ.
Силовая часть схемы
Современные фирменные частотники имеют на выходе мощные транзисторы структуры MOSFET или IGBT, специально предназначенные для работы в преобразователях частоты. В ряде случаев эти транзисторы объединены в модули, что в целом улучшает показатели всей конструкции. Управление этими транзисторами производится с помощью специализированных микросхем-драйверов. В некоторых моделях драйверы выпускаются встроенными в транзисторные модули.
Наиболее распространены в настоящее время микросхемы и транзисторы фирмы International Rectifier. В описываемой схеме вполне возможно применить драйверы IR2130 или IR2132. В одном корпусе такой микросхемы содержится сразу шесть драйверов: три для нижнего ключа и три для верхнего, что позволяет легко собрать трехфазный мостовой выходной каскад. Кроме основной функции эти драйверы содержат также несколько дополнительных, например защита от перегрузок и коротких замыканий. Более подробную информацию об этих драйверах можно узнать из технических описаний Data Sheet на соответствующие микросхемы.
При всех достоинствах единственный недостаток этих микросхем их высокая цена, поэтому автор конструкции пошел другим, более простым, дешевым, и в то же время работоспособным путем: специализированные микросхемы-драйверы заменены микросхемами интегрального таймера КР1006ВИ1 (NE555).
Выходные ключи на интегральных таймерах
Если вернуться к рисунку 6, то можно заметить, что схема имеет для каждой из трех фаз выходные сигналы, обозначенные как «Н» и «В». Наличие этих сигналов позволяет раздельно управлять верхними и нижними ключами. Такое разделение позволяет формировать паузу между переключением верхних и нижних ключей при помощи блока управления, а не самими ключами, как было показано в схеме на рисунке 3.
Схема выходных ключей с применением микросхем КР1006ВИ1 (NE555) показана на рисунке 9. Естественно, что для трехфазного преобразователя понадобится три экземпляра таких ключей.
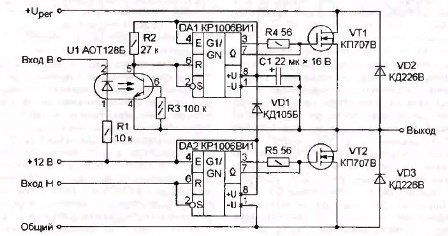
В качестве драйверов верхних (VT1) и нижних (VT2) ключей используются микросхемы КР1006ВИ1, включенные по схеме триггеров Шмидта. С их помощью возможно получить импульсный ток затвора не менее 200мА, что позволяет получить достаточно надежное и быстрое управление выходными транзисторами.
Микросхемы нижних ключей DA2 имеют гальваническую связь с источником питания +12В и, соответственно, с блоком управления, поэтому их питание осуществляется от этого источника. Микросхемы верхних ключей можно запитать так же, как было показано на рисунке 3 с использованием дополнительных выпрямителей и отдельных обмоток на трансформаторе. Но в данной схеме применяется иной, так называемый, «бустрепный» метод питания, смысл которого в следующем. Микросхема DA1 получает питание от электролитического конденсатора C1, заряд которого происходит по цепи: +12В, VD1, C1, открытый транзистор VT2 (через электроды сток – исток), «общий».
Другими словами заряд конденсатора C1 происходит в то время, когда открыт транзистор нижнего ключа. В этот момент минусовой вывод конденсатора С1 оказывается практически накоротко соединен с общим проводом (сопротивление открытого участка «сток – исток» у мощных полевых транзисторов составляет тысячные доли Ома!), что и обеспечивает возможность его заряда.
При закрытом транзисторе VT2 также закроется и диод VD1, заряд конденсатора C1 прекратится до следующего открытия транзистора VT2. Но заряд конденсатора C1 достаточен для питания микросхемы DA1 на время, пока закрыт транзистор VT2. Естественно, что в этот момент транзистор верхнего ключа находится в закрытом состоянии. Данная схема силовых ключей оказалась настолько хороша, что без изменений применяется и в других любительских конструкциях.
В данной статье рассмотрены лишь самые простые схемы любительских трехфазных инверторов на микросхемах малой и средней степени интеграции, с которых все начиналось, и где можно даже по схеме рассмотреть все «изнутри». Более современные конструкции выполнены с применением микроконтроллеров, чаще всего серии PIC, схемы которых также неоднократно публиковались в журналах «Радио».
Микроконтроллерные блоки управления по схеме более просты, чем на микросхемах средней степени интеграции, имеют такие нужные функции, как плавный пуск двигателя, защита от перегрузок и коротких замыканий и некоторые другие. В этих блоках все реализовано за счет управляющих программ или как их принято называть «прошивок». Именно от этих программ и зависит насколько хорошо или плохо будет работать блок управления трехфазного инвертора.
Достаточно простые схемы контроллеров трехфазного инвертора опубликованы в журнале «Радио» 2008 №12. Статья называется «Задающий генератор для трехфазного инвертора». Автор статьи А. Долгий является также автором цикла статей о микроконтроллерах и многих других конструкций. В статье приведены две простых схемы на микроконтроллерах PIC12F629 и PIC16F628.
Частота вращения в обеих схемах изменяется ступенчато с помощью однополюсных переключателей, что вполне достаточно во многих практических случаях. Там же дается ссылка где можно скачать готовые «прошивки», и, более того, специальную программу, с помощью которой можно изменять параметры «прошивок» по своему усмотрению. Возможна также работа генераторов режиме «демо». В этом режиме частота генератора уменьшена в 32 раза, что позволяет визуально с помощью светодиодов наблюдать работу генераторов. Также даются рекомендации по подключению силовой части.
Но, если не хочется заниматься программированием микроконтроллера фирма Motorola выпустила специализированный интеллектуальный контроллер MC3PHAC, предназначенный для систем управления 3-фазным двигателем. На его базе возможно создание недорогих систем регулируемого трехфазного привода, содержащего все необходимые функции для управления и защиты. Подобные микроконтроллеры находят все более широкое применение в различной бытовой технике, например, в посудомоечных машинах или холодильниках.
В комплекте с контроллером MC3PHAC возможно использование готовых силовых модулей, например IRAMS10UP60A разработанных фирмой International Rectifier. Модули содержат шесть силовых ключей и схему управления. Более подробно с этими элементами можно в их документации Data Sheet, которую достаточно просто найти в интернете.
Частотный привод 5-200Гц (10-400Гц) своими руками
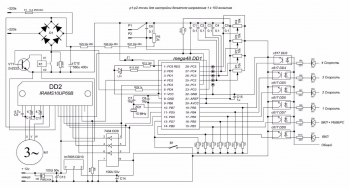
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200Гц
- Скорость набора частоты 5-50Гц в секунду
- Скорость снижения частоты 5-50Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200Гц)
- Вольт добавка 0-20%
- Две “заводских” настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750вт, но крутит и 1.1кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса .
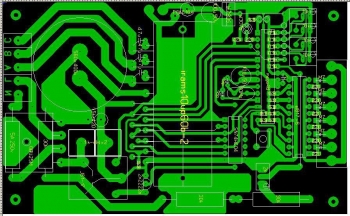
Проект в layout
Ниже фото того, что у меня получилось
Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа) .
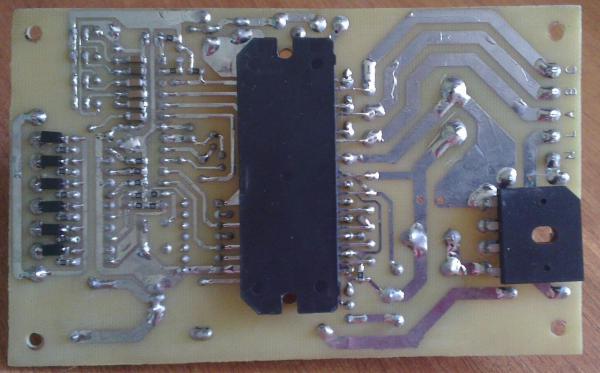
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220в 50Гц). Скорость набора частоты установлена на уровне 15Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 “штырь”. на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200Гц., 1v-40Гц, 1.25v-50Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки маштабирования напряжения DC звена 1в -100в (на схеме R30).
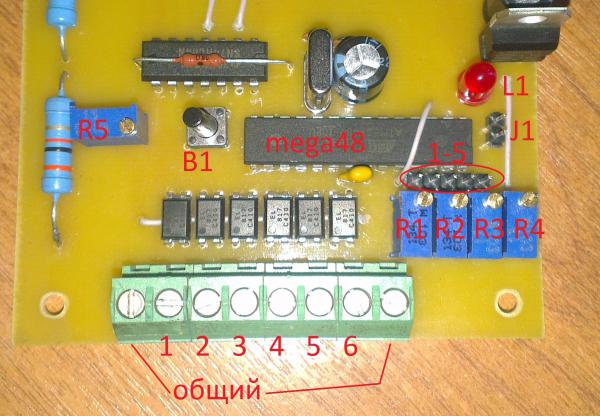
Расположение элементов
Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО. На этом настройка завершена.
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет “заводские ” настройки, которые подходят как для двигателя с напряжением 220В и частотой 50Гц), так и для двигателя с напряжением 380в и частотой 50гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить “заводские ” настройки для двигателя (220в 50Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того . светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220В – 50Гц
- Вольт добавка (напряжение намагничивания, торможения ) – 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220В- 30Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200Гц /220 то резистор нужно выкрутить на максимум; если написано 100Гц/ 220в нужно добиться 2.5 Вольта на 1-ом контакте. (1Вольт на первом контакте соответствует 40Гц); если на двигателе написано 50Гц/400В то нужно выставить 27Гц/0,68 В (например:(50/400)*220=27Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25Гц – 200Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5Гц/сек – 50Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5Гц/сек – 50Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать. Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220в 50Гц с вольт добавкой в 10 % .
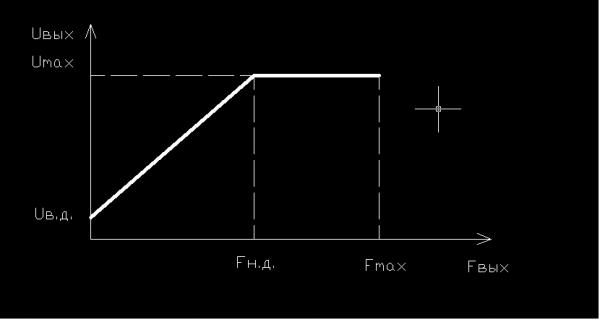
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50Гц , номинальное напряжение 80В, Чтобы узнать какая будет номинальная частота при 220В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50Гц одной фазы (на 3-х фазах зависает комп )
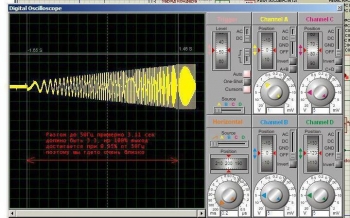
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50Гц 220В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 КВт.
Главное у данного модуля: ток короткого замыкания 140А против 47А, защита настроена на уровне 25А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет “хана”. Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20МГц, то привод получится 10-400Гц; темп разгона 10-100Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380В 50Гц, а настройки для 220В 50Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
В свободном доступе прошивке не будет, НО запрограммированный контролер ATmega48-10pu или ATmega48-20pu будет дешевле mc3phac. Готов ответить на все ваши вопросы.
Цифровые формирователи трехфазного напряжения с ШИМ-управлением
Texas Instruments CD4017B CD4070B CD4093B
Михаил Шустов, г. Томск
Рассмотрены схемы цифровых формирователей трехфазного напряжения регулируемой частоты с возможностью плавного управления шириной заполняющих выходной импульс высокочастотных сигналов в пределах от 1 до 99%.
Формирователи трехфазных сигналов с возможностью регулирования частоты выходных сигналов и их интеграла мощности с использованием широтно-импульсной модуляции (ШИМ) известны из монографий и журнальных статей последних лет [1–3]. Несмотря на очевидный прогресс в совершенствовании схем устройств подобного назначения, они остаются избыточно сложными для повторения. Ниже приводятся две схемы относительно простых цифровых формирователей трехфазного напряжения регулируемой частоты с возможностью управления шириной заполняющих выходной импульс высокочастотных сигналов.
Формирователи трехфазных сигналов (Рисунки 1 и 2) построены по аналогичной структурной схеме и включают генератор импульсов повышенной частоты с независимой регулировкой частоты и скважности [4], делитель частоты, формирователь трехфазных сигналов и выходные каскады.
 | ||
| Рисунок 1. | Формирователь трехфазного напряжения с мультиступенчатым переключением частоты выходных импульсов и независимым управлением ширины заполняющих выходной импульс высокочастотных сигналов. | |
Формирователь, Рисунок 1, содержит собственно генератор прямоугольных импульсов на элементе DD1.1 микросхемы CD4093 (КР1561ТЛ1) с коэффициентом заполнения, близким к 99%, работающий на частоте порядка 20 кГц. На элементе DD1.2 выполнен узел плавной регулировки ширины сигналов задающего генератора. Регулировка ширины импульсов (коэффициента заполнения D) в пределах от 1 до 99% производится потенциометром R2.
 | ||
| Рисунок 2. | Формирователь трехфазного напряжения с плавной перестройкой частоты выходных импульсов и независимым управлением ширины заполняющих выходной импульс высокочастотных сигналов. | |
На элементах DD2.1 и DD2.2 микросхемы CD4070 (К561ЛП2) выполнен целочисленный делитель частоты входного сигнала, имеющий коэффициент деления примерно от 13 до 267. Этот коэффициент деления ступенчато задается плавной регулировкой потенциометра R4 и зависит от RC-постоянной времени (R3+R4)C2. Несмотря на то, что коэффициент деления меняется ступенчато, при больших значениях этого коэффициента ступенчатая перестройка частоты выходного сигнала несущественно отличается от плавной перестройки.
На микросхеме DD3 CD4017 (К561ИЕ8) выполнен делитель частоты входного сигнала на 3 и, одновременно, формирователь трехфазного напряжения.
Выходные каскады на каждую из фаз выполнены по идентичным схемам (блоки A, B и С). На вход каждого из этих каскадов поступает сигнал соответствующей фазы (A, B и С) частотой 25…500 Гц и, одновременно, сигнал частотой порядка 20 кГц, плавно регулируемый по коэффициенту заполнения от 1 до 99%. В итоге на выходах (A, B и С) устройства формируются серии высокочастотных (
20 кГц) импульсов регулируемой ширины (от 1 до 99%) в пределах длительности низкочастотных (25…500 Гц) трехфазных сигналов.
Второй формирователь трехфазного напряжения, Рисунок 2, имеет генератор импульсов с независимой регулировкой частоты и скважности [4], выполненный на элементах DD1.1 и DD1.2 микросхемы CD4093 (КР1561ТЛ1). Генератор работает на частоте 1.5…12 кГц (перестройка потенциометром R2). Регулировка коэффициента заполнения D производится потенциометром R4 в пределах от 1 до 99% и совершенно не зависит от частоты генерации.
Сигнал с выхода задающего генератора поступает на вход двухступенчатого делителя частоты, выполненного на микросхемах DD2 и DD3 CD4017 (К561ИЕ8). Второй каскад делителя (микросхема DD3) одновременно выполняет функции формирователя трехфазного напряжения. Итоговый коэффициент деления частоты равен 30 (10×3).
Выходные каскады устройства, Рисунок 2, выполнены по схеме, идентичной приведенной ранее на Рисунке 1.
В итоге на выходе формирователя трехфазного напряжения, Рисунок 2, формируются серии из 30 высокочастотных (1.5…12 кГц) импульсов регулируемой ширины (от 1 до 99%) в пределах длительности низкочастотных (50…400 Гц) трехфазных сигналов.
Задающий генератор регулятора частоты для трёхфазного асинхронного двигателя
Трёхфазные асинхронные двигатели находят широкое применение в промышленности и в быту благодаря своей простоте и надёжности. Отсутствие искрящего и греющегося коллекторнощёточного узла, а также простая конструкция ротора обуславливают долгий срок их эксплуатации, упрощают профилактику и обслуживание. Однако при необходимости регулировать частоту вращения вала такого двигателя возникают сложности. Для этого обычно применяют специальные преобразователи, называемые частотными регуляторами, изменяющие частоту питающего двигатель напряжения. Такие регуляторы нередко позволяют питать трёхфазный двигатель от однофазной сети, что особенно актуально при их применении в быту.
Частотным регуляторам посвящено довольно много статей, например, [1-3]. К сожалению, большинство описанных конструкций не очень подходят для повторения, поскольку они либо слишком сложны [1], либо (как регулятор, описанный в [2]) построены из дорогих деталей, стоимость которых достигает половины стоимости регулятора промышленного изготовления. Дополнительные функции регулятора [2] необходимы далеко не всегда. Поэтому для многих простых применений такой регулятор невыгоден. Устройство, описанное в [3], несложно по схеме, но организовать плавное регулирование частоты вращения с его помощью затруднительно.
Оптимальным для повторения можно считать устройство, описанное в [1], если его немного упростить. Оно построено на дешёвых широко распространённых микросхемах, поэтому нет нужды покупать дорогостоящие микроконтроллеры или специализированные модули. В описываемом в настоящей статье устройстве из [1] оставлен только формирователь импульсов управления. Остальное изменено с целью упрощения.
Как известно, при уменьшении частоты питающего двигатель напряжения необходимо пропорционально снижать и его амплитуду. Проще всего это делать с помощью широтно-импульсной модуляции формируемого напряжения. В [1] для этого использованы отдельный генератор и пять микросхем. Это не очень удобно, поскольку требует применять для управления двигателем сдвоенный переменный резистор и налаживать два генератора, да и число микросхем можно сократить.
Я использовал другой способ реализации широтно-импульсной модуляции, позволяющий упростить устройство и его налаживание. Теперь оно состоит из регулируемого по частоте генератора импульсов постоянной длительности, счётчика-делителя частоты следования импульсов генератора на три, формирователя импульсов управления и оптронов, управляющих силовыми ключами инвертора постоянного напряжения в трёхфазное переменное.
Формирователь импульсов управления делит частоту поступающих на него импульсов на шесть. Излучающие диоды оптронов включены так, что ток через них течёт только в отрезки времени, когда на выходе генератора установлен высокий логический уровень напряжения, а на соответствующем выходе формирователя импульсов управления – низкий. Поэтому каждый полу-период напряжения, подаваемого на обмотку двигателя, состоит из девяти импульсов постоянной длительности, но с регулируемыми паузами между ними. При этом снижение эффективного значения напряжения, подаваемого на обмотки, происходит автоматически по нужному закону за счёт увеличения скважности при понижении его частоты.
Принципиальная схема задающего генератора частотного регулятора, использующего такой принцип, изображена на рис. 1. Он разработан для системы питания осевого вентилятора с трёхфазным двигателем мощностью 0,37 кВт. На триггере Шмитта DD3.4 и транзисторе VT1 построен генератор импульсов. Рассмотрим его работу с момента, когда конденсатор C9 разряжен и на выходе триггера DD3.4 установлен высокий логический уровень, а на выходах параллельно соединённых триггеров DD3.5 и DD3.6 – низкий.

Рис. 1. Принципиальная схема задающего генератора частотного регулятора
Конденсатор C9 начинает заряжаться через резистор R12 и сопротивление сток-исток транзистора VT1, зависящее от напряжения на его затворе. В некоторый момент времени напряжение на конденсаторе превысит верхний порог переключения триггера, уровень на выходе которого станет низким. Далее начнётся разрядка конденсатора C9. После того как напряжение на конденсаторе достигнет нижнего порога переключения триггера, всё повторится сначала.
Длительность импульса низкого уровня на выходе триггера DD3.4 и высокого уровня на выходах триггеров DD3.5 и DD3.6 неизменна и определяется постоянной времени цепи C9R13. А продолжительность пауз между импульсами зависит от напряжения на затворе полевого транзистора VT1, которое устанавливают переменным резистором R3. Чем оно выше, тем меньше сопротивление сток-исток транзистора, следовательно, короче паузы между импульсами и выше частота их следования. При максимальной частоте паузы между импульсами минимальны, поэтому напряжение, подаваемое на обмотки двигателя, близко к напряжению силовых ключей.
При понижении частоты длительность пауз увеличивается, что ведёт к уменьшению среднего значения напряжения на обмотке двигателя.
Переменным резистором R3 и регулируют частоту вращения двигателя, а подстроечным резистором R4 устанавливают её минимальное значение. Резистор R12 определяет минимальную длительность пауз между импульсами.
Такой генератор сложнее, чем в [1], но применён по нескольким причинам. Во-первых, он позволяет получить широкий интервал регулирования частоты при небольшом сопротивлении переменного резистора R3. У большинства переменных резисторов при переходе подвижного контакта с металлического контакта на резистивное покрытие (или наоборот) происходит резкое изменение сопротивления. Причём, чем больше номинальное сопротивление резистора, тем ярче это свойство проявляется. А в обычном генераторе для получения широкого интервала регулирования требуются именно высокоомные переменные резисторы. На практике этот эффект проявляется как резкий рывок вала двигателя и бросок потребляемого им тока при приближении движка переменного резистора к крайнему положению.
Во-вторых, стало возможным реализовать плавный запуск двигателя без существенного усложнения устройства. Это актуально для вентиляторов, особенно центробежных, поскольку момент инерции рабочего колеса у них, как правило, довольно велик, что способствует длительной работе двигателя в пусковом режиме со значительным превышением номинального потребляемого тока.
В-третьих, благодаря тому что частотой генератора управляют изменением постоянного напряжения, при необходимости легко организовать дистанционное регулирование частоты вращения вала двигателя.
Для реализации плавного пуска служат элементы C2, R1, R2, VD1, а также реле K2. В момент включения питания цепь обмотки реле K2 разорвана, излучающие диоды оптронов U1-U6 отключены от генератора импульсов, конденсатор C2 разряжен. В этом состоянии подстроечным резистором R2 устанавливают минимальную частоту следования импульсов генератора, с которой начнётся запуск двигателя. Следует отметить, что минимальная частота зависит в некоторой степени и от положения движка переменного резистора R3.
При нажатии на кнопку SB1 “Пуск” реле K2 своими контактами K2.2 подключит оптроны к генератору. Конденсатор C2 начнёт заряжаться в основном через резистор R2. Напряжение на затворе транзистора, а следовательно, и частота генератора плавно увеличиваются. Подбирая ёмкость конденсатора C2, можно изменять скорость разгона двигателя. Когда частота генератора достигнет значения, установленного переменным резистором R3, диод VD1 закроется. Конденсатор C2, заряжаясь до напряжения питания через резистор R2, на дальнейшую работу генератора не влияет.
При нажатии на кнопку SB2 “Стоп” реле K2 отключает оптроны, а контактами K2.1 разряжает конденсатор C2. Реле K1 управляет узел токовой защиты частотного регулятора. При перегрузке оно размыкает цепь питания обмотки реле K2. Для дополнительной защиты частотный регулятор подключён к сети через автоматический выключатель с током отключения 3 А.
Если плавный пуск и управление частотным регулятором с помощью кнопок не требуются, все элементы, находящиеся на схеме внутри штрих-пунктирной рамки, можно не устанавливать. Вместо участка сток-исток транзистора VT1 следует включить по схеме реостата переменный резистор сопротивлением 100 кОм. Ёмкость конденсатора C9 лучше увеличить до 470 нФ, а сопротивление резисторов R12 и R13 выбрать соответственно
200 Ом и 1,6 кОм. Аноды излучающих диодов оптронов U1-U6 следует соединить с выходами триггеров DD3.5 и DD3.6 напрямую.
С выхода триггера DD3.4 импульсы поступают на вход счётчика DD4, коэффициент деления которого установлен равным трём. Формирователь импульсов управления построен на счётчике DD1, элементах 3ИЛИ-НЕ микросхемы DD2 и триггерах Шмитта DD3.1-DD3.3. Его работа достаточно подробно описана в [1] и [2].
Работу узла управления поясняют временные диаграммы сигналов в некоторых его точках, показанные на рис. 2. В качестве выходных сигналов фазы А показаны токи, протекающие через излучающие диоды оптронов U1 и U4. Поскольку, в отличие от [1], в рассматриваемом устройстве все процессы синхронизированы с частотой генератора, так называемое мёртвое время At между открытыми состояниями разных силовых ключей, равное по длительности паузе между импульсами генератора, обеспечивается автоматически. При указанных на схеме номиналах резистора R12 и конденсатора C9 и максимальной частоте импульсов её длительность – не менее 30 мкс.

Рис. 2. Временные диаграммы сигналов
Полевой транзистор КП501А можно заменить на BSN304 или серии КП505. Вместо микросхемы 74НСТ14 лучше установить один из её функциональных аналогов КР1554ТЛ2, 74АС14, отличающихся повышенной нагрузочной способностью. Применять здесь микросхемы серии К561, а тем более К176 не следует.
1. Нарыжный В. Источник питания трёхфазного электродвигателя от однофазной сети с регулировкой частоты вращения. – Радио, 2003, № 12, с. 35-37.
2. Галичанин А. Система частотного управления асинхронным двигателем. – Радио, 2016, № 6, с. 35-41.
3. Хиценко В. Три фазы из одной. – Радио, 2015, № 9, с. 42, 43.
Автор: Е. Герасимов, станица Выселки Краснодарского края
Мнения читателей
- Валерий / 10.02.2020 – 15:39
https://photos.app.goo.gl/dVMkBT4pjrMy5VHZ7 Как подключить Ваше устройство к инвертору (ссылка на инвертор)? - Валерий / 10.02.2020 – 15:08
Подскажите, пожалуйста, как подключить это устройство к инвертору для вращения двигателя. - петр / 10.09.2018 – 17:16
Номера выводов кр1561ле10 не соответствуют справочнику - Александр / 24.05.2017 – 19:40
В качестве выходных сигналов фазы А показаны токи, протекающие через излучающие диоды оптронов U1 и U4 Через U1 и U2 Зачем инвертировать сигнал для драйверов -(А, В, С)
Вы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу:
All-Audio.pro
Статьи, Схемы, Справочники

Задающий генератор для трехфазного инвертора
Преобразователь однофазного напряжения в трехфазное. Сегодня в быту находят широкое применение различные устройства, для питания которых требуется трехфазное напряжение. Но бытовая сеть, как правило, однофазная. Поэтому возникает потребность преобразовать однофазное напряжение в трехфазное.
Поиск данных по Вашему запросу:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Перейти к результатам поиска >>>
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Пятикиловатный трехфазный генератор асинхронного типа
Трехфазный мостовой инвертор на транзисторах
В статье описывается инвертор напряжения для питания трехфазного электродвигателя. Инвертор осуществляет ручное скалярное управление работой электродвигателя. В современном частотно-регулируемом электроприводе можно выделить три основные составляющие:.
Преобразователь электроэнергии выпрямитель-инвертор. Асинхронный электродвигатель. Преимущественно в частотно-регулируемых приводах применяется простая схема, состоящая из неуправляемого выпрямителя и независимого инвертора напряжения.
В регулируемых электроприводах переменного тока используются три основные структуры системы автоматического регулирования:. Реализация заданной статической зависимости между частотой и действующим значением напряжения U, питающего электродвигатель скалярное управление электроприводом. Алгоритм векторного управления. Алгоритм прямого управления моментом.
При скалярном управлении контур управления разомкнут. Частота вращения электродвигателя в этом случае определяется моментом нагрузки и выходной частотой преобразователя f. Система автоматической регулировки должна измерять фазные токи IА, IВ и вычислять активное значение тока, пропорциональное моменту.
Область применения такого преобразователя с системой скалярного типа: насосы, вентиляторы, центрифуги, конвейеры. Система автоматического регулирования с векторным управлением используется для регулирования частоты вращения или момента электродвигателя. Типичное применение: краны, подъемники, лебедки. Такое управление требует измерения тока статора IА, IВ и числа оборотов ротора двигателя.
Полученные сигналы вводятся в математическую модель асинхронного электродвигателя. Система автоматического регулирования прямого управления моментом основана на реализации во времени работы двух моделей:. Регулирование в скользящем режиме вектора потокосцепления статора и момента М электродвигателя по значениям, их заданных и действительных величин. Такое регулирование осуществляется модулем сверхбыстрых процессоров. Модель асинхронного электродвигателя через каждый промежуток времени осуществляет вычисление действительных значений потока статора и момента по вводимой в нее модель информации: токам фаз статора, напряжению звена постоянного тока и положению ключей инвертора.
Кроме того, производится вычисление скорости асинхронного двигателя и частоты выходного тока инвертора. Этот метод прямого управления моментом привлекателен тем, что отсутствует широтно-импульсная модуляция и не используется датчик вращения электродвигателя. Из сказанного следует, что реализовать два последних метода САР часто затруднительно. В большинстве преобразователей частоты для формирования синусоидального тока в статорной обмотке асинхронного двигателя используется ШИМ широтно-импульсная модуляция.
Наряду с массой преимуществ такой способ получения синусоидального тока не свободен от существенных недостатков, главный из которых заключается в том, что для получения малых гармонических составляющих тока необходимо значительно увеличить частоту переключений ключей инвертора до Это вызывает рост динамических потерь в ключах инвертора, а также усложнение и без того тяжелых энергетических условий, в которых работают силовые элементы схемы.
Кроме того, принцип ШИМ не позволяет полностью использовать напряжение источника питания, особенно в случаях, когда необходимо реализовать повышенный момент на валу асинхронного двигателя. На рис. Это устройство реализует ручное скалярное управление электродвигателем, поскольку нет обратной связи не контролируется величина тока в обмотках статора. Реализация заданной статической зависимости между частотой f и действующим значением напряжения U, питающего электродвигатель, осуществляется вручную.
Задающий генератор выполнен на основе 3 инверторов DD1. Такой генератор мало чувствителен к изменениям величины напряжения питания. Регулирование частоты генератора а, следовательно, и выходной частоты преобразователя осуществляется резистором R3. Широтно-импульсный модулятор построен на микросхеме DD7 и инверторе DD Микросхема DD7 западный аналог этой микросхемы CD содержит два инвертора и два полевых р-канальный и n-канальный транзистора.
Сопротивление каналов этих транзисторов почти линейно зависит от входного напряжения. При высоком уровне напряжения на выходе генератора диод VD2 будет проводить, то есть выходное сопротивление р-канала транзистора DD7. Подобным же образом выходное сопротивление n-канального транзистора включается параллельно резистору R9 при низком уровне на выходе генератора. Широтно-импульсный модулятор реализуется изменением скважности импульсов генератора в соответствии с входным напряжением, поступающим с двухзвенной интегрирующей цепочки R6C4, R7C5.
Само изменение частоты колебаний минимально зависит от их скважности, так как выходное сопротивление одного транзистора возрастает, а другого всегда уменьшается при любой величине управляющего напряжения. Таким образом, среднее за период значение шунтирующего резистор R9 сопротивления остается постоянным.
Частота колебаний генератора соответствует 10 кГц. Увеличение управляющего напряжения, поступающего на модулятор, приводит к увеличению длительности выходных импульсов. Уменьшение управляющего напряжения, соответственно, приводит к уменьшению длительности импульсов выходного сигнала. При этом частота колебаний остается неизменной.
Выходной сигнал задающего генератора DD1. На микросхеме DD2 выполнен десятичный счетчик-делитель частоты с дешифратором. Высокий уровень на входе сброса R выв. На каждом выходе счетчика-дешифратора DD2 высокий уровень последовательно появляется только на длительность периода тактового импульса.
Выходные импульсы с выходов микросхемы DD2 формируются в трехфазную импульсную последовательность с помощью микросхемы DD3. Микросхема DD4 осуществляет инверсию трехфазной импульсной последовательности. С помощью D-триггеров микросхемы DD8 получают трехфазную импульсную последовательность, задержанную относительно исходной.
Из прямых и инверсных выходных сигналов микросхем DD3. Преобразователь реализован по схеме полного трехфазного моста, выполненного на шести транзисторах VT1—VT6. Синусоидальный выходной сигнал формируется методом широтно-импульсной модуляции. Входное напряжение для этих драйверов должно находиться в пределах При снижении напряжения ниже 10 В драйвер отказывается работать, так как он имеет встроенную схему контроля питающего напряжения.
Повышение напряжения выше 15 В приводит к выходу из строя драйверов или затворов полевых транзисторов. Драйверы DA1—DA3 имеют вход SD, при подаче на который сигнала высокого уровня они запираются, и преобразователь не работает. Это можно использовать для защиты преобразователя от перегрузки.
Выходной сигнал с задающего генератора поступает на делитель частоты на 3 DD5. Логический элемент DD5. Выходной сигнал логического элемента DD5. Длительность импульса можно регулировать, изменяя величину резистора R5. От длительности импульса зависит величина зазора между включением силовых ключей.
Это необходимо для того, чтобы силовые ключи не оказались одновременно открытыми, что опасно протеканием через них сквозных токов. Диоды VD7—VD10 устанавливаются в том случае, когда используемые в инверторе силовые транзисторы не имеют внутреннего диода.
Мощность преобразователя зависит от типа примененных полевых транзисторов. Полевые транзисторы, а также транзисторы IGBT можно устанавливать параллельно для увеличения мощности преобразователя. Сигналы 6—21 показаны без высокочастотного заполнения. Как правило, в преобразователях частоты для получения широтно-импульсной модуляции используются микропроцессоры.
Мне хотелось решить эту задачу аппаратным способом. Проблема заключается в том, что широтно-импульсную модуляцию необходимо менять на каждом полупериоде синусоидального напряжения.
Калашник В. В современном частотно-регулируемом электроприводе можно выделить три основные составляющие: 1. Система управления. В регулируемых электроприводах переменного тока используются три основные структуры системы автоматического регулирования: 1.
Система автоматического регулирования прямого управления моментом основана на реализации во времени работы двух моделей: 1. Работа инвертора На рис. Литература 1.

Задающий генератор регулятора частоты для трёхфазного асинхронного двигателя
Изобретение относится к устройствам преобразовательной техники и может быть использовано для питания с частотой Гц бортовых систем летательных аппаратов ЛА , а также для питания высокочастотного инструмента частотой Гц или Гц. Изобретение относится к устройствам преобразовательной техники, может быть использовано для питания с частотой Гц бортовых систем летательных аппаратов ЛА , а также для питания высокочастотного инструмента частотой Гц или Гц. Под ред. Изд-во: Техника, , с. Недостатками таких инверторов и способов управления ими являются относительно невысокая надежность из-за возможности протекания сквозных токов через противофазные управляемые вентили всех фаз при переключении, а также высокий коэффициент гармоник Кг , то есть значительное отличие выходного напряжения от синусоидального. Кроме того, согласно изобретению, между общим выводом вспомогательных ключей и средней точкой фильтровых конденсаторов может быть включен дополнительный конденсатор. Трехфазный инвертор со звеном постоянного тока состоит из основных силовых модулей IGBT , соединенных по мостовой схеме, состоящих из полностью управляемых ключей и диодов, включенных встречно-параллельно основным ключам, силовых модулей вспомогательных ключей, состоящих из полностью управляемых ключей IGBT , включенных параллельно основным ключам, общий вывод вспомогательных ключей присоединен непосредственно к средней точке либо через дополнительный конденсатор 10 к средней точке, образованной двумя фильтровыми конденсаторами 11, 12, отрицательный зажим источника питания 13 соединен с соответствующей фазой нагрузки
Три фазы — из одной
Существует большое.. Термин промежуточное звено обозначает наличие цепи постоянного тока между выпрямителем и инвертором. Трехфазный мостовой инвертор рис. V6, к которым подключены три обмотки статора двигателя. Известны инверторы с интервалом проводимости ключей или эл. Период выходного напряжения составляет эл. От импульсов системы. V6 поочередно открываются через 60 эл. Рассмотрим формирование напряжения на нагрузке.
трехфазный непосредственный преобразователь частоты для асинхронного электропривода

На фиг, 1 приведена принципиальная схема инвертора со схемой управления; на фиг, 2 – временные диаграммы, поясняющие работу инвертора; на фиг, 3 – временные диаграммы, поясняющие сущность регулирования напряжения в инверторе; на фиг, 4 – блок-схема инвертора с системой управления в регулируемом по напряжению варианте; на фиг, 5 – схема преобразователя, иллюстрирующая другой возможный вариант ее применения,Собственно инвертор И выполнен на транзисторах и диодах , образующих мост обратного тока. Система управления включает в себя: первый преобразователь частоты ПЧ , выполненный на вентильных мостах 13, 14 с транзисторами 15, 16 в диагоналях постоянного тока, управляемых от трансформатора 17 задающего генератора модуш- руюшей частоты ЗГ , Нулевая точка 18, под ПЧ 1 выполненный аналогично первому, стой разницей, что его нулевая точка 23 под- Ьключена к “-” шине питания инвертора, трехфазный задающий генератор несущий частоты ТЗГ гх выполненный по схеме пересчетногокольца на трансформаторах 24 – Хт 1 Х, когда ме. Сттст с ;,Оат -Э;.
Трехфазный инвертор со звеном постоянного тока и способ управления им
Полезная модель относится к электротехнике и может быть использована в системах, работающих в режиме генератора стабильной или регулируемой частоты при постоянной или переменной скорости привода. Качество электрической энергии обеспечивается регулятором напряжения и частоты статора. Недостатком этого устройства является значительная мощность, циркулирующая между роторной и статорной обмотками АСГ, большие габариты блока преобразования координат и преобразователя частоты. Недостатком прототипа является наличие преобразователя частоты, вход которого подключен к питающей сети, а выход подключен к начальным выводам статорной обмотки, а также наличие двухрежимного блока управления инвертором. Мощность преобразователя частоты больше мощности двигателя за счет увеличенного значения пусковых токов двигателя. Наличие выпрямителя и инвертора, включенных последовательно между статорными и роторными обмотками также увеличивает габариты преобразователя частоты силового блока управления.
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ И ШИРОТНО-ИМПУЛЬСНЫЕ ПРЕОБРАЗОВАТЕЛИ
Изобретение относится к устройствам преобразовательной техники и может быть использовано для питания с частотой Гц бортовых систем летательных аппаратов ЛА , а также для питания высокочастотного инструмента частотой Гц или Гц. Технический результат заключается в упрощении конструкции, уменьшении массогабаритных показателей устройства, повышении надежности и качества выходного напряжений за счет контроля и управления генератором паузы. Изобретение относится к устройствам преобразовательной техники, может быть использовано для питания с частотой Гц бортовых систем летательных аппаратов ЛА , а также для питания высокочастотного инструмента частотой Гц или Гц. Под ред. Изд-во: Техника, , с. Недостатками таких инверторов являются относительно низкая надежность из-за возможности протекания сквозных токов через противофазные управляемые вентили всех фаз при переключении, а также высокий коэффициент нелинейных искажений, то есть значительное отличие выходного напряжения от синусоидального. Существуют схемы формирования трехфазных последовательностей импульсов управления вентилями каждой фазы, но они не позволяют формировать интервал между включениями противофазных вентилей [В.
Что можно приготовить из кальмаров: быстро и вкусно
В статье описывается инвертор напряжения для питания трехфазного электродвигателя. Инвертор осуществляет ручное скалярное управление работой электродвигателя. В современном частотно-регулируемом электроприводе можно выделить три основные составляющие:. Преобразователь электроэнергии выпрямитель-инвертор.
Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке. Преобразователь предназначался для питания миниатюрного трехфазного двигателя ДИД-5ТА, который использовался в станке для сверления печатных плат. При этом следует отметить, что рабочая частота этого двигателя Гц, а напряжение питания 27В. Схема генератора показана на рисунке 1. Как видно из схемы преобразователь состоит из трех частей: генератора-формирователя импульсов трехфазной последовательности на микросхемах DD1…DD3, трех ключей на составных транзисторах VT1…VT6 и собственно электродвигателя M1.
Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке. Преобразователь предназначался для питания миниатюрного трехфазного двигателя ДИД-5ТА, который использовался в станке для сверления печатных плат. При этом следует отметить, что рабочая частота этого двигателя Гц, а напряжение питания 27В. Схема генератора показана на рисунке 1. Как видно из схемы преобразователь состоит из трех частей: генератора-формирователя импульсов трехфазной последовательности на микросхемах DD1…DD3, трех ключей на составных транзисторах VT1…VT6 и собственно электродвигателя M1.
Сварочные аппараты используются во многих сферах жизнедеятельности человека. Они помогают решать проблемы в бытовых условиях загородного дома, на мелких производственных предприятиях, в автомастерских, на крупных промышленных объектах. Особенно сварка востребована на строительных площадках, где еще недавно использовали тяжелые трансформаторные сварочные аппараты. Они имеют большие габариты, такой агрегат приходится перевозить на автомобильном транспорте.
Трехфазный инвертор
Инверторные устройства используются в самых различных областях. В большинстве случаев, это однофазные приборы, работающие по классическим схемам. Однако, возникают ситуации, когда необходимо обеспечить электроэнергией асинхронный двигатель от аккумуляторной батареи или просто получить трехфазный ток для специфических нужд. И здесь на выручку приходит трехфазный инвертор с увеличенным числом электронных управляемых ключей, преобразующий постоянный ток в трехфазный переменный с требуемыми характеристиками.
Где применяется
Область применения трехфазных инверторов достаточно большая, а в некоторых случаях без них просто невозможно обойтись. Управление электродвигателями будет гораздо эффективнее, когда используются модифицированные современные трехфазные инверторные устройства. Они включаются в общую схему с одно- и трехфазными асинхронными двигателями, коллекторными агрегатами, а также с трехфазными двигателями постоянного тока.
Для управления разными типами двигателей используются свои режимы, поддерживаемые соответствующим программным обеспечением. Это дает возможность подключать практически любые двигатели в обмотках которых имеется от 1 до 3 фаз. В виде исключения можно отметить конструкцию биполярных двухфазных шаговых двигателей, оборудованных двумя независимыми обмотками.

В состав комплектующих такого инвертора входит основная плата управления, входы и выходы питания, а также интерфейс для ввода необходимых данных и вывода текущих показаний на дисплей или табло. Довольно часто управления осуществляется с помощью компьютера. Подключение инвертора выполняется через специальный разъем, установленный на плате.
В современных инверторах управления предусмотрен демонстрационный режим, при котором поочередно запускается показ основных функций – пуска и остановки, изменения скорости и реверса. Для переключений между функциями предусмотрены 4 кнопки, расположенные на плате.
Разновидности трехфазных инверторов
По своим параметрам, характеристикам и предназначению все виды преобразователей можно условно разделить на несколько групп.
В первую очередь, они могут быть автономными или зависимыми. В первом случае постоянный ток преобразуется в переменный, где частоту определяет система управления, а характеристики выходного напряжения тесно связаны с параметрами нагрузки. Зависимые устройства выдают ток, определяемый частотой местной сети, с постоянными значениями. В автономных приборах возможны плавные изменения напряжения от нуля до наибольшей допустимой величины. Поэтому такие инверторы чаще всего используются в различных схемах.

Существует дополнительная классификация автономных инверторов в соответствии с его схемой, способами принудительной коммутации, параметрами нагрузки и источников питания. Они могут быть автономными инверторами тока – АИТ или напряжения – АИН, а также резонансными – АИР.
В соответствии с количеством токовых коммутаций, трехфазный инвертор бывает одно- или двухступенчатым. В первом случае ток нагрузки сразу поступает к тиристору, включающемуся в работу, а во втором происходит изначальное переключение нагрузки на вспомогательную цепь, и лишь потом она переходит в основную. Если в схеме используются тиристоры, рассчитанные только на одну операцию, в нее могут быть дополнительно включены узлы принудительной коммутации.
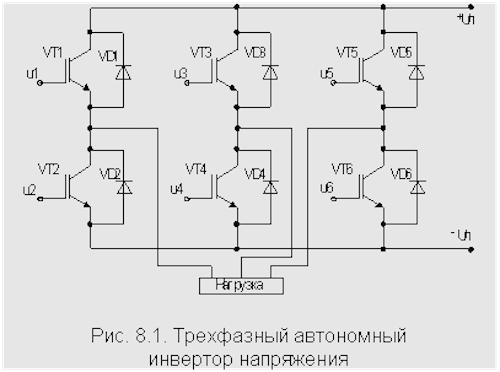
Как работает 3-х фазный инвертор
В состав силовой части трехфазного инвертора входят транзисторные ключи с маркировкой от VT1 до VT6 в количестве шести элементов и диоды обратного тока VD1–VD6, также шесть штук. Диоды соединяются в общий мост и подключаются параллельно с источником питания.
Силовая трёхфазная цепь инверторов может быть построена разными способами. При постоянной структуре цепи, подача управляющих сигналов происходит одновременно сразу к трем силовым транзисторам. Таким образом, ее структура остается неизменной. В случае использования переменной структуры, количество транзисторов для подачи управляющих сигналов нередко бывает менее трех.
Продолжительность переключений, выполняемых транзисторными ключами и частота напряжения на выходе, зависит от используемой системы управления. В интервале, включающем в себя один период, переключения на выходе транзисторов анодной и катодной групп может происходить от одного до множества раз.
Конфигурация тока на выходе получается в соответствии с характеристиками нагрузки. Если нагрузка активно-индуктивная, получается форма в виде ломаной кривой, разделенной на четыре части, расположенные на половине периода. Эффект от токовой нагрузки определяется интегрированием наиболее характерных участков токовой кривой. Необходимая форма нагрузки, в том числе и синусоидальная, получается при многократном включении и отключении управляемых вентилей в пределах одного периода.
Регулировка выходного напряжения в инверторе осуществляется при помощи широтно-импульсной модуляции – ШИМ. Сформированная модуляция в виде прямоугольника, получила название широтно-импульсного регулирования – ШИР. Такое регулирование выходного напряжения выполняется за счет изменяющейся продолжительности подключения нагрузки к источнику питания. Данная схема применяется в момент паузы между импульсами, когда происходит запирание двух одинаковых силовых транзисторов.
В случае групповых переключений в нагрузочном напряжении возникает определенная пауза. Это происходит при изменении током своего знака в тот момент, когда два транзистора начинают запираться. Если же ток к этому времени не изменит своего знака или нагрузка окажется слишком продолжительной, то формирования паузы в напряжении на выходе не получится. При использовании ШИР, структура тока и напряжения на выходе в диапазоне малых частот и напряжений, значительно ухудшается. Для того чтобы избежать этого негативного явления, ШИР приходится выполнять на действующих несущих частотах.
Схема подключения
Подключение трехфазного инвертора в качестве примера можно рассмотреть в общей связке с электродвигателем. На представленном ниже рисунке обозначен двигатель М, работающий под управлением ключей V1 – V6. Все полупроводники для более наглядного отображения представлены как обычные механические контакты. Для питания используется постоянное напряжение Ud, поступающее из выпрямителя, не отмеченного на схеме. Ключи 1, 3, 5 относятся к верхним, а три ключа 2, 4, 6 – к нижним.
Верхние и нижние ключи никогда не открываются одновременно, во избежание короткого замыкания. Схема будет нормально работать, когда нижний ключ открывается, а верхний к этому времени уже находится в закрытом состоянии. Для формирования этой паузы используются контроллеры.
Продолжительность паузы должна гарантировать, чтобы силовые транзисторы закрывались своевременно. При недостаточности этого временного промежутка, верхний и нижний ключи могут одновременно открыться на очень короткое время. Это крайне нежелательно и не должно происходить систематически, поскольку выходные транзисторы сильно нагреваются и быстро выйдут из строя. Подобная ситуация известна как сквозные токи.
Существует гальваническая связь между нижними и верхними ключами и с управляющим устройством. Подача сигнала управления выполняется через резисторы непосредственно к составному транзистору, выполняющему функции драйвера нижнего ключа. У верхних ключей отсутствует гальваническая связь с элементом управления и с общим проводником. Поэтому для более эффективного управления к верхнему составному транзистору помимо драйвера дополнительно устанавливается оптрон. Питание верхних ключей производится от отдельных выпрямителей, каждый из которых подключен к собственной обмотке трансформатора.
Различия между одно- и трехфазными инверторами
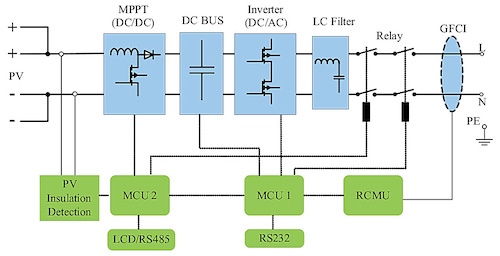
Существуют принципиальные отличия однофазного от трехфазного инвертора. В основном они связаны с их конструктивными особенностями. Это наглядно видно на примере устройств, используемых с солнечными батареями. Схема однофазного инвертора использует 1 или 2 трекера МРРТ, выполняющих слежение за максимальной отметкой мощности панели.
Далее в цепь включается инвертор, выполняющий преобразование тока и синхронизирующий его с сетью. Электроэнергия, полученная от этого инвертора, поступает непосредственно в сеть. К каждому трекеру подключается своя солнечная панель. При наличии двух трекеров можно подключить на выбор 1 или сразу 2.
Трехфазный инвертор напряжения может иметь в своей схеме от 1 до 4 трекеров, в зависимости от мощности каждого преобразователя. Они также выполняют слежение за точкой максимальной мощности и направляют постоянный ток от солнечной панели к входу инвертора. В свою очередь, преобразователь соединяется с сетевыми фазами и синхронизирует их сдвиг на все 3 фазы.
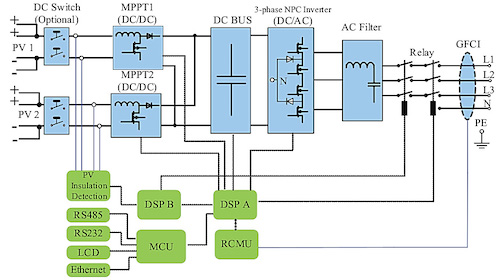
Таким образом, основное отличие между обоими устройствами заключается в разнице распределения полученной энергии. Распределение электричества трехфазным прибором осуществляется равномерно между всеми фазами. Если же для этой цели используется три однофазных инвертора, то выходная мощность каждого из них будет колебаться в соответствии с мощностью, выдаваемой солнечной панелью.
Довольно часто возникает вопрос, что выгоднее использовать, одно- или трехфазный инвертор? Решение принимается индивидуально, исходя из конкретных условий эксплуатации. Несмотря на 1 корпус вместо 3-х, он может оказаться слишком дорогим, поэтому сравнение нужно делать по тем или иным известным моделям. То же самое касается VHHN-трекеров, количества силовых ключей и других важных компонентов.